 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeorGAN: A Synthetic Data Augmentation Pipeline for Simultaneous Generation of Surgical Images and Ground Truth Labels
Jun 17, 2025Deep learning in medical imaging faces obstacles: limited data diversity, ethical issues, high acquisition costs, and the need for precise annotations. Bleeding detection and localization during surgery is especially challenging due to the scarcity of high-quality datasets that reflect real surgical scenarios. We propose orGAN, a GAN-based system for generating high-fidelity, annotated surgical images of bleeding. By leveraging small "mimicking organ" datasets, synthetic models that replicate tissue properties and bleeding, our approach reduces ethical concerns and data-collection costs. orGAN builds on StyleGAN with Relational Positional Learning to simulate bleeding events realistically and mark bleeding coordinates. A LaMa-based inpainting module then restores clean, pre-bleed visuals, enabling precise pixel-level annotations. In evaluations, a balanced dataset of orGAN and mimicking-organ images achieved 90% detection accuracy in surgical settings and up to 99% frame-level accuracy. While our development data lack diverse organ morphologies and contain intraoperative artifacts, orGAN markedly advances ethical, efficient, and cost-effective creation of realistic annotated bleeding datasets, supporting broader integration of AI in surgical practice.
Nocturnal eye inspired liquid to gas phase change soft actuator with Laser-Induced-Graphene: enhanced environmental light harvesting and photothermal conversion
Jan 21, 2025

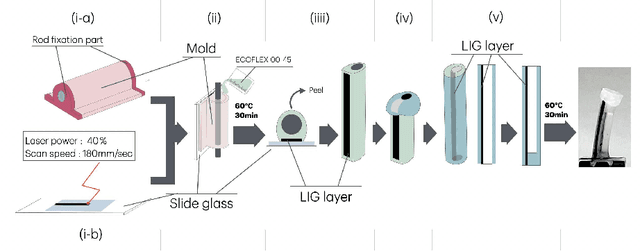

Robotic systems' mobility is constrained by power sources and wiring. While pneumatic actuators remain tethered to air supplies, we developed a new actuator utilizing light energy. Inspired by nocturnal animals' eyes, we designed a bilayer soft actuator incorporating Laser-Induced Graphene (LIG) on the inner surface of a silicone layer. This design maintains silicone's transparency and flexibility while achieving 54% faster response time compared to conventional actuators through enhanced photothermal conversion.
S-RRT*-based Obstacle Avoidance Autonomous Motion Planner for Continuum-rigid Manipulator
Sep 27, 2024



Continuum robots are compact and flexible, making them suitable for use in the industries and in medical surgeries. Rapidly-exploring random trees (RRT) are a highly efficient path planning method, and its variant, S-RRT, can generate smooth feasible paths for the end-effector. By combining RRT with inverse instantaneous kinematics (IIK), complete motion planning for the continuum arm can be achieved. Due to the high degrees of freedom of continuum arms, the null space in IIK can be utilized for obstacle avoidance. In this work, we propose a novel approach that uses the S-RRT* algorithm to create paths for the continuum-rigid manipulator. By employing IIK and null space techniques, continuous joint configurations are generated that not only track the path but also enable obstacle avoidance. Simulation results demonstrate that our method effectively handles motion planning and obstacle avoidance while generating high-quality end-effector paths in complex environments. Furthermore, compared to similar IIK methods, our approach exhibits superior computation time.
Control Pneumatic Soft Bending Actuator with Feedforward Hysteresis Compensation by Pneumatic Physical Reservoir Computing
Sep 11, 2024The nonlinearities of soft robots bring control challenges like hysteresis but also provide them with computational capacities. This paper introduces a fuzzy pneumatic physical reservoir computing (FPRC) model for feedforward hysteresis compensation in motion tracking control of soft actuators. Our method utilizes a pneumatic bending actuator as a physical reservoir with nonlinear computing capacities to control another pneumatic bending actuator. The FPRC model employs a Takagi-Sugeno (T-S) fuzzy model to process outputs from the physical reservoir. In comparative evaluations, the FPRC model shows equivalent training performance to an Echo State Network (ESN) model, whereas it exhibits better test accuracies with significantly reduced execution time. Experiments validate the proposed FPRC model's effectiveness in controlling the bending motion of the pneumatic soft actuator with open and closed-loop control systems. The proposed FPRC model's robustness against environmental disturbances has also been experimentally verified. To the authors' knowledge, this is the first implementation of a physical system in the feedforward hysteresis compensation model for controlling soft actuators. This study is expected to advance physical reservoir computing in nonlinear control applications and extend the feedforward hysteresis compensation methods for controlling soft actuators.
Two Degree of Freedom Adaptive Control for Hysteresis Compensation of Pneumatic Continuum Bending Actuator
Sep 18, 2023



Soft robotics, with their inherent flexibility and infinite degrees of freedom (DoF), offer promising advancements in human-machine interfaces. Particularly, pneumatic artificial muscles (PAMs) and pneumatic bending actuators have been fundamental in driving this evolution, capitalizing on their mimetic nature to natural muscle movements. However, with the versatility of these actuators comes the intricate challenge of hysteresis - a nonlinear phenomenon that hampers precise positioning, especially pronounced in pneumatic actuators due to gas compressibility. In this study, we introduce a novel 2-DoF adaptive control for precise bending tracking using a pneumatic continuum actuator. Notably, our control method integrates adaptability into both the feedback and the feedforward element, enhancing trajectory tracking in the presence of profound nonlinear effects. Comparative analysis with existing approaches underscores the superior tracking accuracy of our proposed strategy. This work discusses a new way of simple yet effective control designs for soft actuators with hysteresis properties.
Trajectory Tracking Control of Dual-PAM Soft Actuator with Hysteresis Compensator
Aug 23, 2023
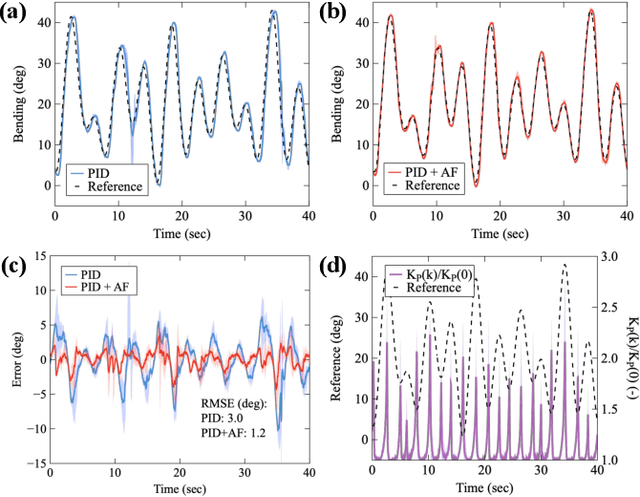


Soft robotics is an emergent and swiftly evolving field. Pneumatic actuators are suitable for driving soft robots because of their superior performance. However, their control is not easy due to their hysteresis characteristics. In response to these challenges, we propose an adaptive control method to compensate hysteresis of a soft actuator. Employing a novel dual pneumatic artificial muscle (PAM) bending actuator, the innovative control strategy abates hysteresis effects by dynamically modulating gains within a traditional PID controller corresponding with the predicted motion of the reference trajectory. Through comparative experimental evaluation, we found that the new control method outperforms its conventional counterparts regarding tracking accuracy and response speed. Our work reveals a new direction for advancing control in soft actuators.