 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTwo Degree of Freedom Adaptive Control for Hysteresis Compensation of Pneumatic Continuum Bending Actuator
Sep 18, 2023



Soft robotics, with their inherent flexibility and infinite degrees of freedom (DoF), offer promising advancements in human-machine interfaces. Particularly, pneumatic artificial muscles (PAMs) and pneumatic bending actuators have been fundamental in driving this evolution, capitalizing on their mimetic nature to natural muscle movements. However, with the versatility of these actuators comes the intricate challenge of hysteresis - a nonlinear phenomenon that hampers precise positioning, especially pronounced in pneumatic actuators due to gas compressibility. In this study, we introduce a novel 2-DoF adaptive control for precise bending tracking using a pneumatic continuum actuator. Notably, our control method integrates adaptability into both the feedback and the feedforward element, enhancing trajectory tracking in the presence of profound nonlinear effects. Comparative analysis with existing approaches underscores the superior tracking accuracy of our proposed strategy. This work discusses a new way of simple yet effective control designs for soft actuators with hysteresis properties.
Trajectory Tracking Control of Dual-PAM Soft Actuator with Hysteresis Compensator
Aug 23, 2023
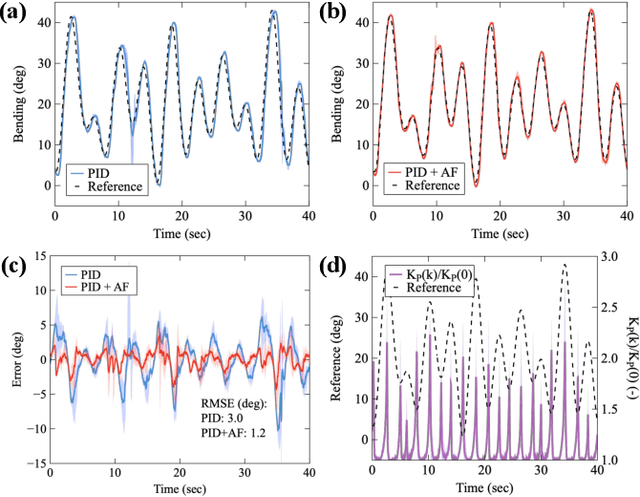


Soft robotics is an emergent and swiftly evolving field. Pneumatic actuators are suitable for driving soft robots because of their superior performance. However, their control is not easy due to their hysteresis characteristics. In response to these challenges, we propose an adaptive control method to compensate hysteresis of a soft actuator. Employing a novel dual pneumatic artificial muscle (PAM) bending actuator, the innovative control strategy abates hysteresis effects by dynamically modulating gains within a traditional PID controller corresponding with the predicted motion of the reference trajectory. Through comparative experimental evaluation, we found that the new control method outperforms its conventional counterparts regarding tracking accuracy and response speed. Our work reveals a new direction for advancing control in soft actuators.