Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNocturnal eye inspired liquid to gas phase change soft actuator with Laser-Induced-Graphene: enhanced environmental light harvesting and photothermal conversion
Paper and Code
Jan 21, 2025

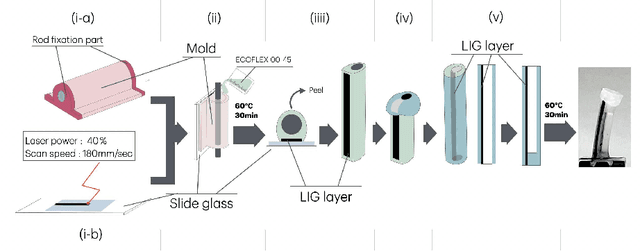

Robotic systems' mobility is constrained by power sources and wiring. While pneumatic actuators remain tethered to air supplies, we developed a new actuator utilizing light energy. Inspired by nocturnal animals' eyes, we designed a bilayer soft actuator incorporating Laser-Induced Graphene (LIG) on the inner surface of a silicone layer. This design maintains silicone's transparency and flexibility while achieving 54% faster response time compared to conventional actuators through enhanced photothermal conversion.
* 23pages, 8 figures, journal paper
View paper on