 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIterative PnP and its application in 3D-2D vascular image registration for robot navigation
Oct 19, 2023This paper reports on a new real-time robot-centered 3D-2D vascular image alignment algorithm, which is robust to outliers and can align nonrigid shapes. Few works have managed to achieve both real-time and accurate performance for vascular intervention robots. This work bridges high-accuracy 3D-2D registration techniques and computational efficiency requirements in intervention robot applications. We categorize centerline-based vascular 3D-2D image registration problems as an iterative Perspective-n-Point (PnP) problem and propose to use the Levenberg-Marquardt solver on the Lie manifold. Then, the recently developed Reproducing Kernel Hilbert Space (RKHS) algorithm is introduced to overcome the ``big-to-small'' problem in typical robotic scenarios. Finally, an iterative reweighted least squares is applied to solve RKHS-based formulation efficiently. Experiments indicate that the proposed algorithm processes registration over 50 Hz (rigid) and 20 Hz (nonrigid) and obtains competing registration accuracy similar to other works. Results indicate that our Iterative PnP is suitable for future vascular intervention robot applications.
Optical flow-based vascular respiratory motion compensation
Aug 31, 2023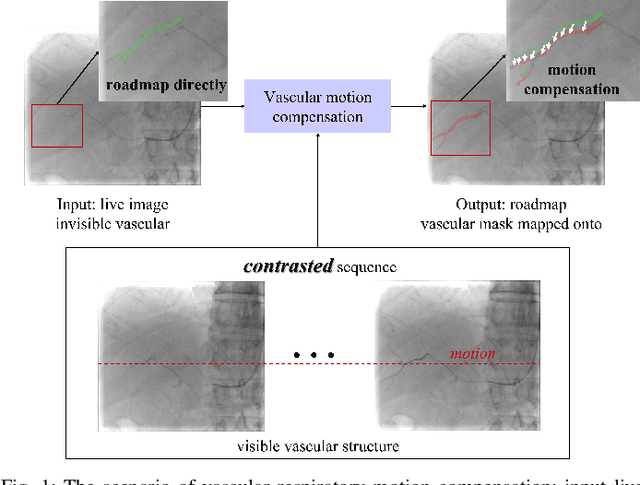
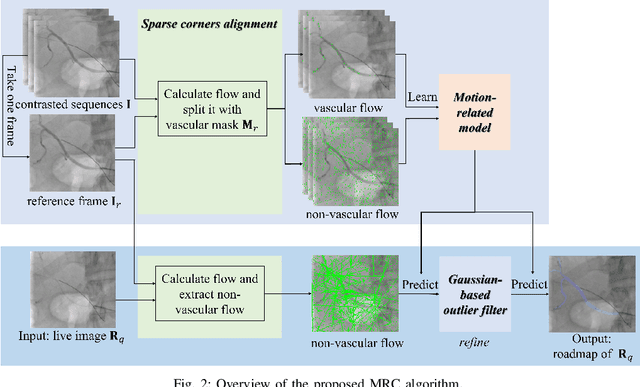
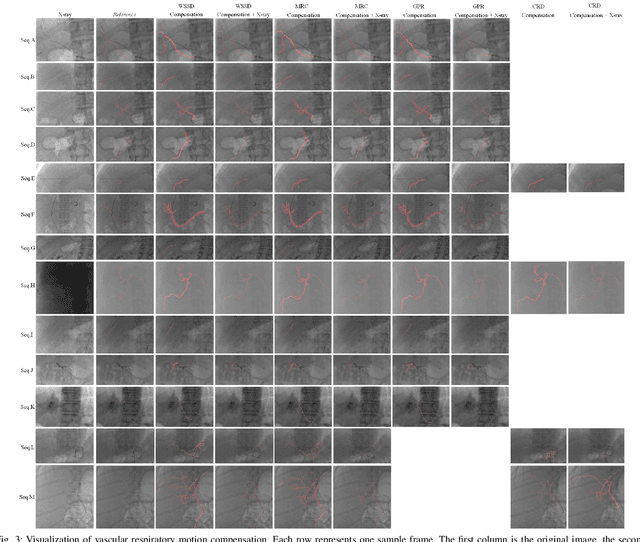

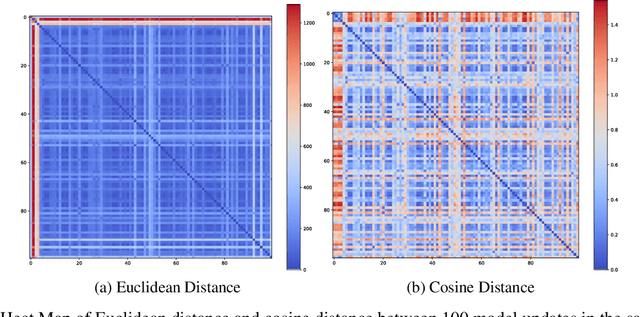
This paper develops a new vascular respiratory motion compensation algorithm, Motion-Related Compensation (MRC), to conduct vascular respiratory motion compensation by extrapolating the correlation between invisible vascular and visible non-vascular. Robot-assisted vascular intervention can significantly reduce the radiation exposure of surgeons. In robot-assisted image-guided intervention, blood vessels are constantly moving/deforming due to respiration, and they are invisible in the X-ray images unless contrast agents are injected. The vascular respiratory motion compensation technique predicts 2D vascular roadmaps in live X-ray images. When blood vessels are visible after contrast agents injection, vascular respiratory motion compensation is conducted based on the sparse Lucas-Kanade feature tracker. An MRC model is trained to learn the correlation between vascular and non-vascular motions. During the intervention, the invisible blood vessels are predicted with visible tissues and the trained MRC model. Moreover, a Gaussian-based outlier filter is adopted for refinement. Experiments on in-vivo data sets show that the proposed method can yield vascular respiratory motion compensation in 0.032 sec, with an average error 1.086 mm. Our real-time and accurate vascular respiratory motion compensation approach contributes to modern vascular intervention and surgical robots.
A Knowledge Distillation-Based Backdoor Attack in Federated Learning
Aug 12, 2022
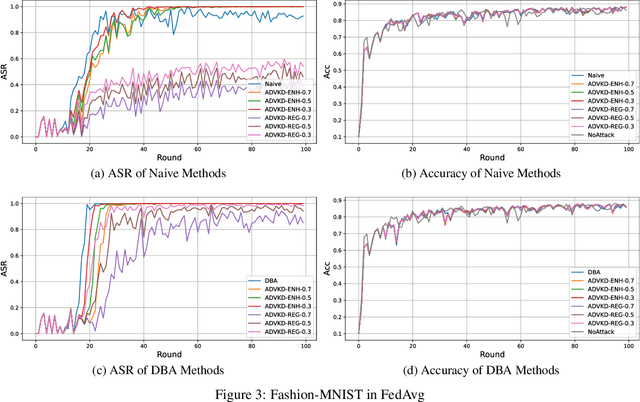
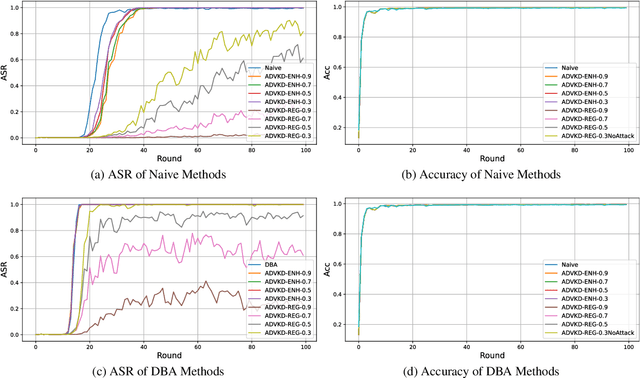
Federated Learning (FL) is a novel framework of decentralized machine learning. Due to the decentralized feature of FL, it is vulnerable to adversarial attacks in the training procedure, e.g. , backdoor attacks. A backdoor attack aims to inject a backdoor into the machine learning model such that the model will make arbitrarily incorrect behavior on the test sample with some specific backdoor trigger. Even though a range of backdoor attack methods of FL has been introduced, there are also methods defending against them. Many of the defending methods utilize the abnormal characteristics of the models with backdoor or the difference between the models with backdoor and the regular models. To bypass these defenses, we need to reduce the difference and the abnormal characteristics. We find a source of such abnormality is that backdoor attack would directly flip the label of data when poisoning the data. However, current studies of the backdoor attack in FL are not mainly focus on reducing the difference between the models with backdoor and the regular models. In this paper, we propose Adversarial Knowledge Distillation(ADVKD), a method combine knowledge distillation with backdoor attack in FL. With knowledge distillation, we can reduce the abnormal characteristics in model result from the label flipping, thus the model can bypass the defenses. Compared to current methods, we show that ADVKD can not only reach a higher attack success rate, but also successfully bypass the defenses when other methods fails. To further explore the performance of ADVKD, we test how the parameters affect the performance of ADVKD under different scenarios. According to the experiment result, we summarize how to adjust the parameter for better performance under different scenarios. We also use several methods to visualize the effect of different attack and explain the effectiveness of ADVKD.