 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Data-Driven Paradigm-Based Image Denoising and Mosaicking Approach for High-Resolution Acoustic Camera
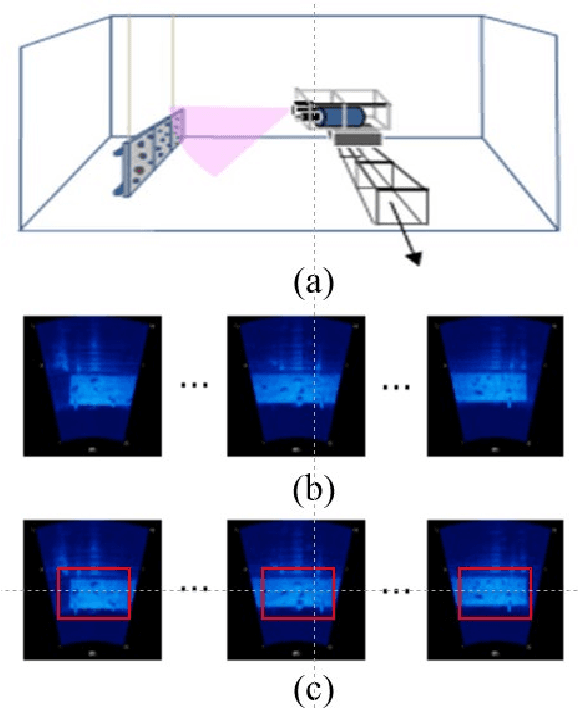
Feb 19, 2025In this work, an approach based on a data-driven paradigm to denoise and mosaic acoustic camera images is proposed. Acoustic cameras, also known as 2D forward-looking sonar, could collect high-resolution acoustic images in dark and turbid water. However, due to the unique sensor imaging mechanism, main vision-based processing methods, like image denoising and mosaicking are still in the early stages. Due to the complex noise interference in acoustic images and the narrow field of view of acoustic cameras, it is difficult to restore the entire detection scene even if enough acoustic images are collected. Relevant research work addressing these issues focuses on the design of handcrafted operators for acoustic image processing based on prior knowledge and sensor models. However, such methods lack robustness due to noise interference and insufficient feature details on acoustic images. This study proposes an acoustic image denoising and mosaicking method based on a data-driven paradigm and conducts experimental testing using collected acoustic camera images. The results demonstrate the effectiveness of the proposal.
Enhancing Marine Debris Acoustic Monitoring by Optical Flow-Based Motion Vector Analysis
Dec 28, 2024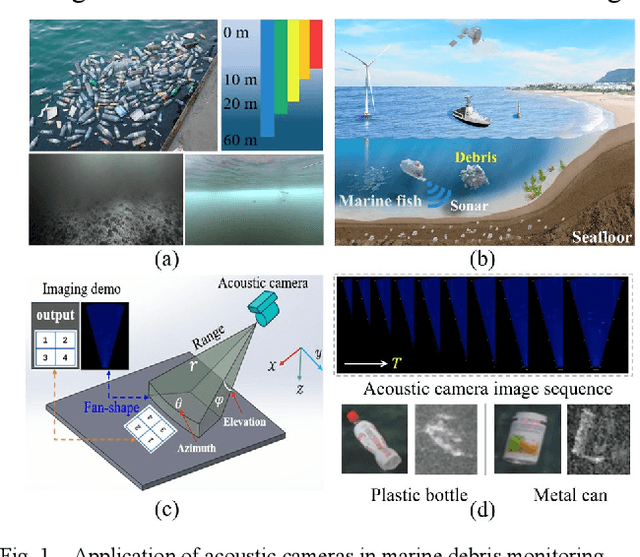
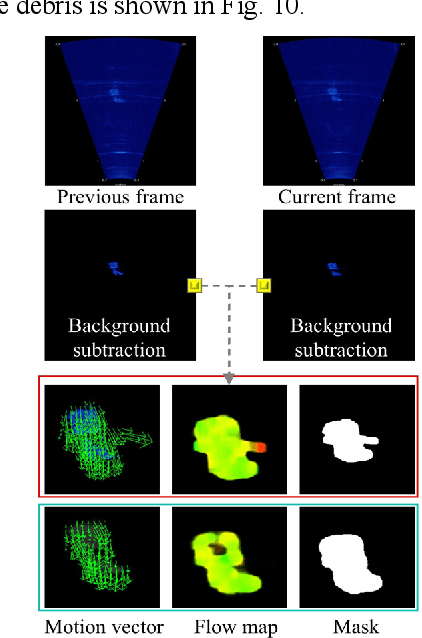

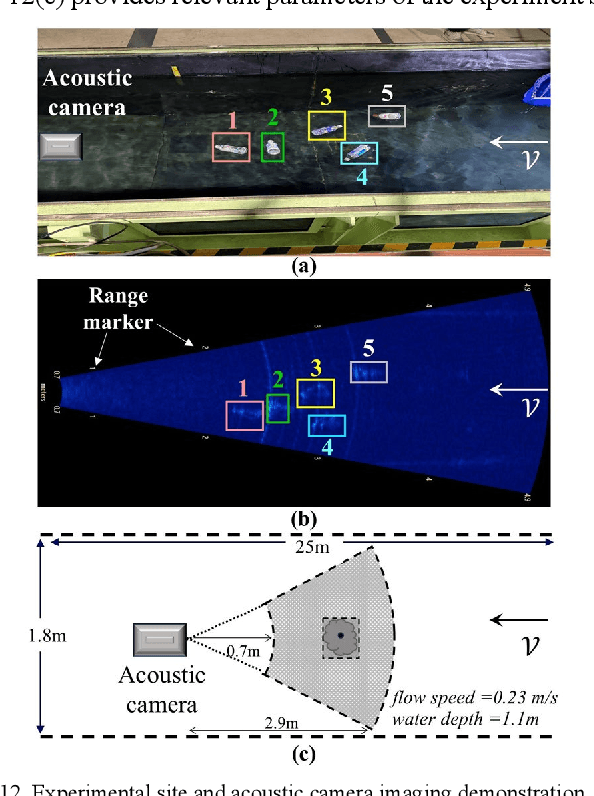
With the development of coastal construction, a large amount of human-generated waste, particularly plastic debris, is continuously entering the ocean, posing a severe threat to marine ecosystems. The key to effectively addressing plastic pollution lies in the ability to autonomously monitor such debris. Currently, marine debris monitoring primarily relies on optical sensors, but these methods are limited in their applicability to underwater and seafloor areas due to low-visibility constraints. The acoustic camera, also known as high-resolution forward-looking sonar (FLS), has demonstrated considerable potential in the autonomous monitoring of marine debris, as they are unaffected by water turbidity and dark environments. The appearance of targets in sonar images changes with variations in the imaging viewpoint, while challenges such as low signal-to-noise ratio, weak textures, and imaging distortions in sonar imagery present significant obstacles to debris monitoring based on prior class labels. This paper proposes an optical flow-based method for marine debris monitoring, aiming to fully utilize the time series information captured by the acoustic camera to enhance the performance of marine debris monitoring without relying on prior category labels of the targets. The proposed method was validated through experiments conducted in a circulating water tank, demonstrating its feasibility and robustness. This approach holds promise for providing novel insights into the spatial and temporal distribution of debris.
Target Height Estimation Using a Single Acoustic Camera for Compensation in 2D Seabed Mosaicking
Nov 19, 2024



This letter proposes a novel approach for compensating target height data in 2D seabed mosaicking for low-visibility underwater perception. Acoustic cameras are effective sensors for sensing the marine environments due to their high-resolution imaging capabilities and robustness to darkness and turbidity. However, the loss of elevation angle during the imaging process results in a lack of target height information in the original acoustic camera images, leading to a simplistic 2D representation of the seabed mosaicking. In perceiving cluttered and unexplored marine environments, target height data is crucial for avoiding collisions with marine robots. This study proposes a novel approach for estimating seabed target height using a single acoustic camera and integrates height data into 2D seabed mosaicking to compensate for the missing 3D dimension of seabed targets. Unlike classic methods that model the loss of elevation angle to achieve seabed 3D reconstruction, this study focuses on utilizing available acoustic cast shadow clues and simple sensor motion to quickly estimate target height. The feasibility of our proposal is verified through a water tank experiment and a simulation experiment.
Monitoring of Hermit Crabs Using drone-captured imagery and Deep Learning based Super-Resolution Reconstruction and Improved YOLOv8
Aug 07, 2024
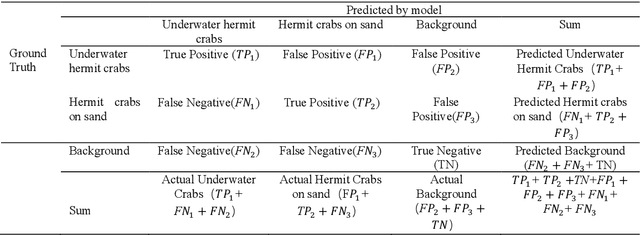


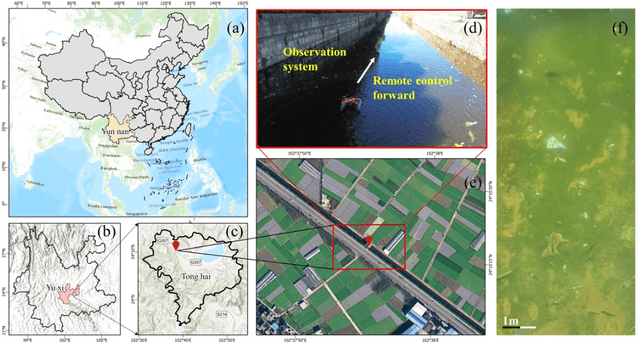
Hermit crabs play a crucial role in coastal ecosystems by dispersing seeds, cleaning up debris, and disturbing soil. They serve as vital indicators of marine environmental health, responding to climate change and pollution. Traditional survey methods, like quadrat sampling, are labor-intensive, time-consuming, and environmentally dependent. This study presents an innovative approach combining UAV-based remote sensing with Super-Resolution Reconstruction (SRR) and the CRAB-YOLO detection network, a modification of YOLOv8s, to monitor hermit crabs. SRR enhances image quality by addressing issues such as motion blur and insufficient resolution, significantly improving detection accuracy over conventional low-resolution fuzzy images. The CRAB-YOLO network integrates three improvements for detection accuracy, hermit crab characteristics, and computational efficiency, achieving state-of-the-art (SOTA) performance compared to other mainstream detection models. The RDN networks demonstrated the best image reconstruction performance, and CRAB-YOLO achieved a mean average precision (mAP) of 69.5% on the SRR test set, a 40% improvement over the conventional Bicubic method with a magnification factor of 4. These results indicate that the proposed method is effective in detecting hermit crabs, offering a cost-effective and automated solution for extensive hermit crab monitoring, thereby aiding coastal benthos conservation.
Underwater litter monitoring using consumer-grade aerial-aquatic speedy scanner (AASS) and deep learning based super-resolution reconstruction and detection network
Aug 07, 2024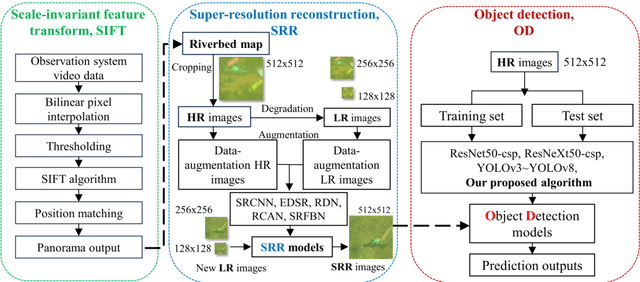


Underwater litter is widely spread across aquatic environments such as lakes, rivers, and oceans, significantly impacting natural ecosystems. Current monitoring technologies for detecting underwater litter face limitations in survey efficiency, cost, and environmental conditions, highlighting the need for efficient, consumer-grade technologies for automatic detection. This research introduces the Aerial-Aquatic Speedy Scanner (AASS) combined with Super-Resolution Reconstruction (SRR) and an improved YOLOv8 detection network. AASS enhances data acquisition efficiency over traditional methods, capturing high-quality images that accurately identify underwater waste. SRR improves image-resolution by mitigating motion blur and insufficient resolution, thereby enhancing detection tasks. Specifically, the RCAN model achieved the highest mean average precision (mAP) of 78.6% for detection accuracy on reconstructed images among the tested SRR models. With a magnification factor of 4, the SRR test set shows an improved mAP compared to the conventional bicubic set. These results demonstrate the effectiveness of the proposed method in detecting underwater litter.
A Self-Supervised Denoising Strategy for Underwater Acoustic Camera Imageries
Jun 05, 2024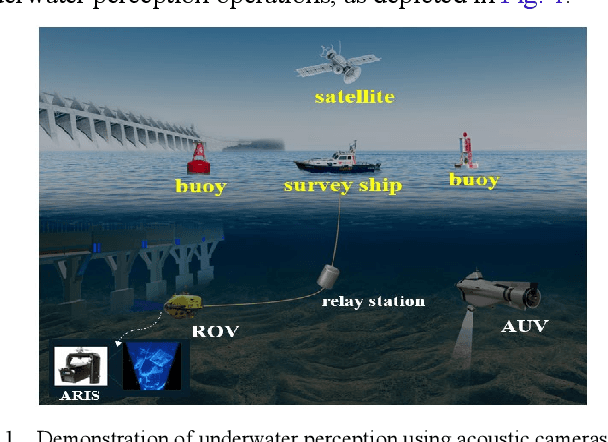
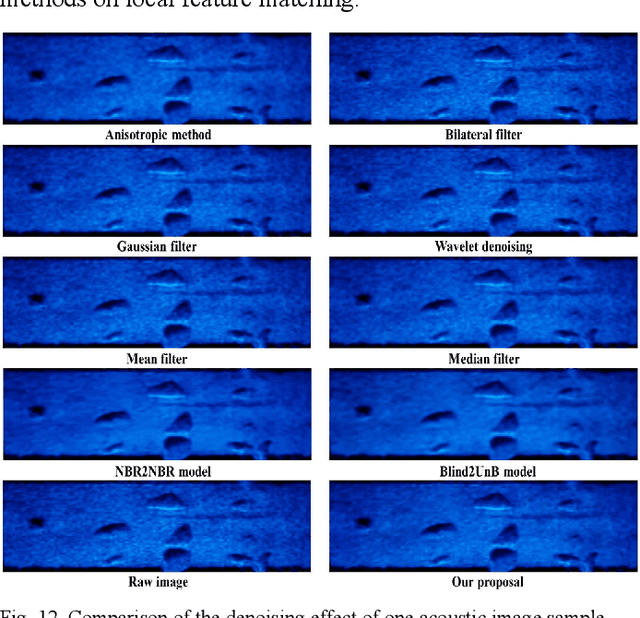
In low-visibility marine environments characterized by turbidity and darkness, acoustic cameras serve as visual sensors capable of generating high-resolution 2D sonar images. However, acoustic camera images are interfered with by complex noise and are difficult to be directly ingested by downstream visual algorithms. This paper introduces a novel strategy for denoising acoustic camera images using deep learning techniques, which comprises two principal components: a self-supervised denoising framework and a fine feature-guided block. Additionally, the study explores the relationship between the level of image denoising and the improvement in feature-matching performance. Experimental results show that the proposed denoising strategy can effectively filter acoustic camera images without prior knowledge of the noise model. The denoising process is nearly end-to-end without complex parameter tuning and post-processing. It successfully removes noise while preserving fine feature details, thereby enhancing the performance of local feature matching.