 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHELIOS: Hierarchical Exploration for Language-grounded Interaction in Open Scenes
Sep 26, 2025Language-specified mobile manipulation tasks in novel environments simultaneously face challenges interacting with a scene which is only partially observed, grounding semantic information from language instructions to the partially observed scene, and actively updating knowledge of the scene with new observations. To address these challenges, we propose HELIOS, a hierarchical scene representation and associated search objective to perform language specified pick and place mobile manipulation tasks. We construct 2D maps containing the relevant semantic and occupancy information for navigation while simultaneously actively constructing 3D Gaussian representations of task-relevant objects. We fuse observations across this multi-layered representation while explicitly modeling the multi-view consistency of the detections of each object. In order to efficiently search for the target object, we formulate an objective function balancing exploration of unobserved or uncertain regions with exploitation of scene semantic information. We evaluate HELIOS on the OVMM benchmark in the Habitat simulator, a pick and place benchmark in which perception is challenging due to large and complex scenes with comparatively small target objects. HELIOS achieves state-of-the-art results on OVMM. As our approach is zero-shot, HELIOS can also transfer to the real world without requiring additional data, as we illustrate by demonstrating it in a real world office environment on a Spot robot.
NL-SLAM for OC-VLN: Natural Language Grounded SLAM for Object-Centric VLN
Nov 12, 2024



Landmark-based navigation (e.g. go to the wooden desk) and relative positional navigation (e.g. move 5 meters forward) are distinct navigation challenges solved very differently in existing robotics navigation methodology. We present a new dataset, OC-VLN, in order to distinctly evaluate grounding object-centric natural language navigation instructions in a method for performing landmark-based navigation. We also propose Natural Language grounded SLAM (NL-SLAM), a method to ground natural language instruction to robot observations and poses. We actively perform NL-SLAM in order to follow object-centric natural language navigation instructions. Our methods leverage pre-trained vision and language foundation models and require no task-specific training. We construct two strong baselines from state-of-the-art methods on related tasks, Object Goal Navigation and Vision Language Navigation, and we show that our approach, NL-SLAM, outperforms these baselines across all our metrics of success on OC-VLN. Finally, we successfully demonstrate the effectiveness of NL-SLAM for performing navigation instruction following in the real world on a Boston Dynamics Spot robot.
AG-SLAM: Active Gaussian Splatting SLAM
Oct 22, 2024
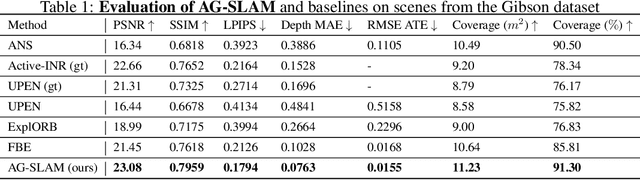


We present AG-SLAM, the first active SLAM system utilizing 3D Gaussian Splatting (3DGS) for online scene reconstruction. In recent years, radiance field scene representations, including 3DGS have been widely used in SLAM and exploration, but actively planning trajectories for robotic exploration is still unvisited. In particular, many exploration methods assume precise localization and thus do not mitigate the significant risk of constructing a trajectory, which is difficult for a SLAM system to operate on. This can cause camera tracking failure and lead to failures in real-world robotic applications. Our method leverages Fisher Information to balance the dual objectives of maximizing the information gain for the environment while minimizing the cost of localization errors. Experiments conducted on the Gibson and Habitat-Matterport 3D datasets demonstrate state-of-the-art results of the proposed method.