 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRAMP: A Benchmark for Evaluating Robotic Assembly Manipulation and Planning
May 16, 2023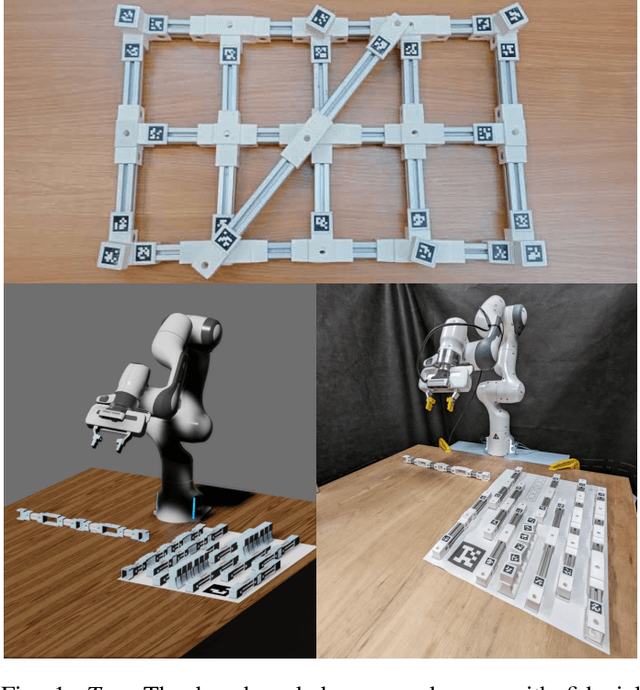
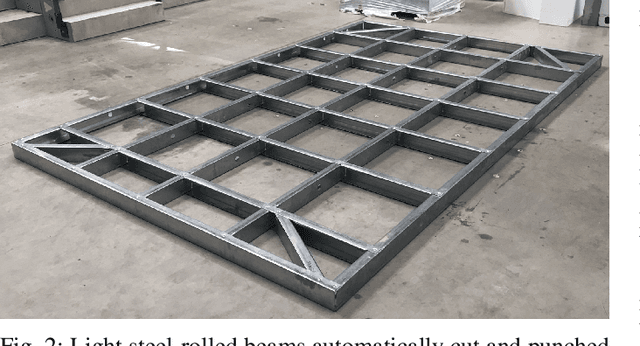
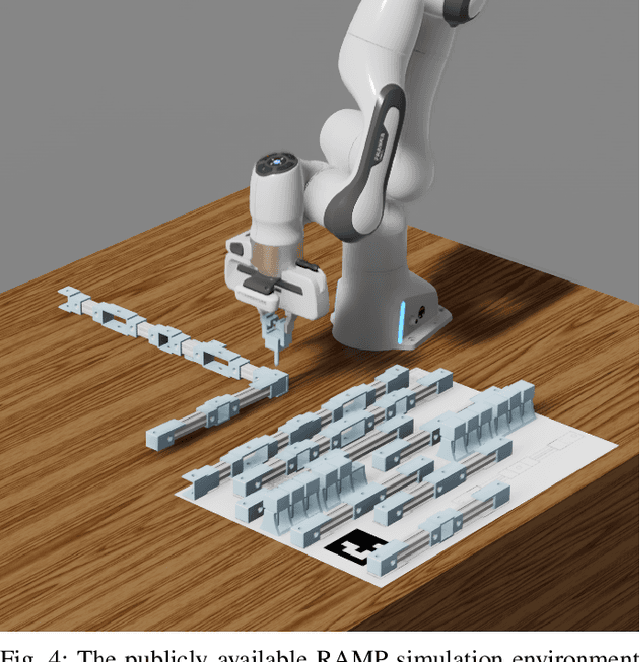
We introduce RAMP, an open-source robotics benchmark inspired by real-world industrial assembly tasks. RAMP consists of beams that a robot must assemble into specified goal configurations using pegs as fasteners. As such it assesses planning and execution capabilities, and poses challenges in perception, reasoning, manipulation, diagnostics, fault recovery and goal parsing. RAMP has been designed to be accessible and extensible. Parts are either 3D printed or otherwise constructed from materials that are readily obtainable. The part design and detailed instructions are publicly available. In order to broaden community engagement, RAMP incorporates fixtures such as April Tags which enable researchers to focus on individual sub-tasks of the assembly challenge if desired. We provide a full digital twin as well as rudimentary baselines to enable rapid progress. Our vision is for RAMP to form the substrate for a community-driven endeavour that evolves as capability matures.