 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Novel Probabilistic V2X Data Fusion Framework for Cooperative Perception
Mar 31, 2022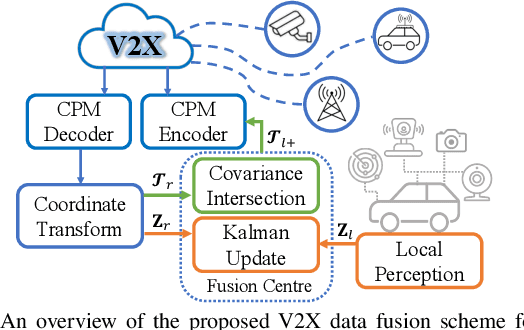
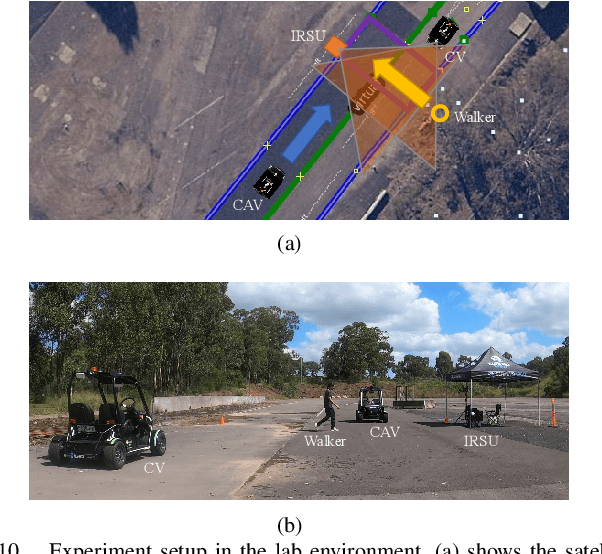
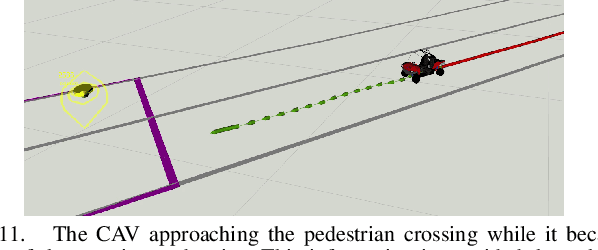
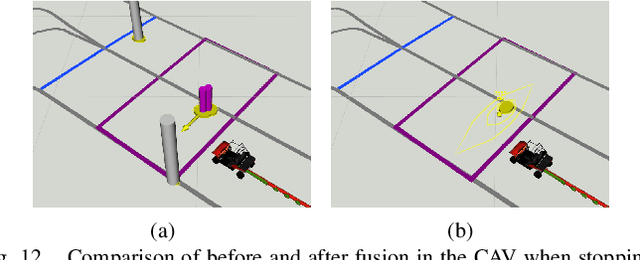
The paper addresses the vehicle-to-X (V2X) data fusion for cooperative or collective perception (CP). This emerging and promising intelligent transportation systems (ITS) technology has enormous potential for improving efficiency and safety of road transportation. Recent advances in V2X communication primarily address the definition of V2X messages and data dissemination amongst ITS stations (ITS-Ss) in a traffic environment. Yet, a largely unsolved problem is how a connected vehicle (CV) can efficiently and consistently fuse its local perception information with the data received from other ITS-Ss. In this paper, we present a novel data fusion framework to fuse the local and V2X perception data for CP that considers the presence of cross-correlation. The proposed approach is validated through comprehensive results obtained from numerical simulation, CARLA simulation, and real-world experimentation that incorporates V2X-enabled intelligent platforms. The real-world experiment includes a CV, a connected and automated vehicle (CAV), and an intelligent roadside unit (IRSU) retrofitted with vision and lidar sensors. We also demonstrate how the fused CP information can improve the awareness of vulnerable road users (VRU) for CV/CAV, and how this information can be considered in path planning/decision making within the CAV to facilitate safe interactions.
Socially Aware Crowd Navigation with Multimodal Pedestrian Trajectory Prediction for Autonomous Vehicles
Nov 23, 2020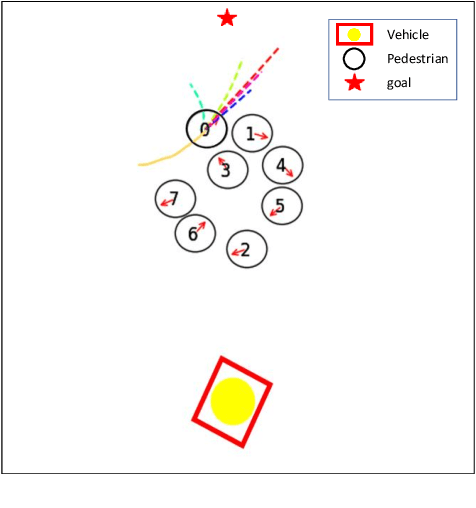
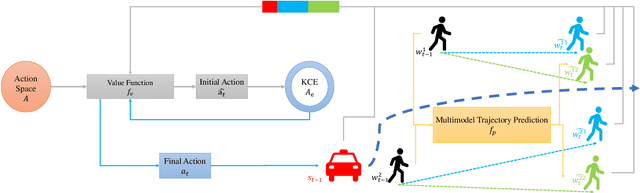
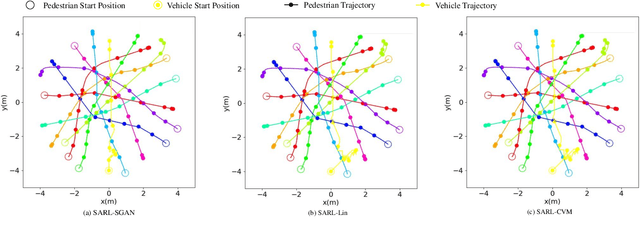
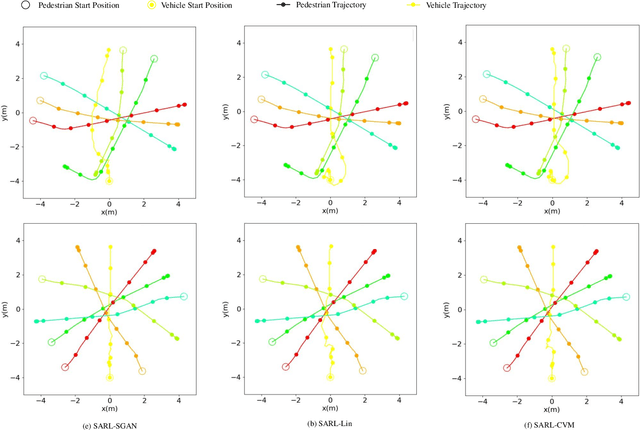
Seamlessly operating an autonomous vehicle in a crowded pedestrian environment is a very challenging task. This is because human movement and interactions are very hard to predict in such environments. Recent work has demonstrated that reinforcement learning-based methods have the ability to learn to drive in crowds. However, these methods can have very poor performance due to inaccurate predictions of the pedestrians' future state as human motion prediction has a large variance. To overcome this problem, we propose a new method, SARL-SGAN-KCE, that combines a deep socially aware attentive value network with a human multimodal trajectory prediction model to help identify the optimal driving policy. We also introduce a novel technique to extend the discrete action space with minimal additional computational requirements. The kinematic constraints of the vehicle are also considered to ensure smooth and safe trajectories. We evaluate our method against the state of art methods for crowd navigation and provide an ablation study to show that our method is safer and closer to human behaviour.
Demonstrations of Cooperative Perception: Safety and Robustness in Connected and Automated Vehicle Operations
Nov 17, 2020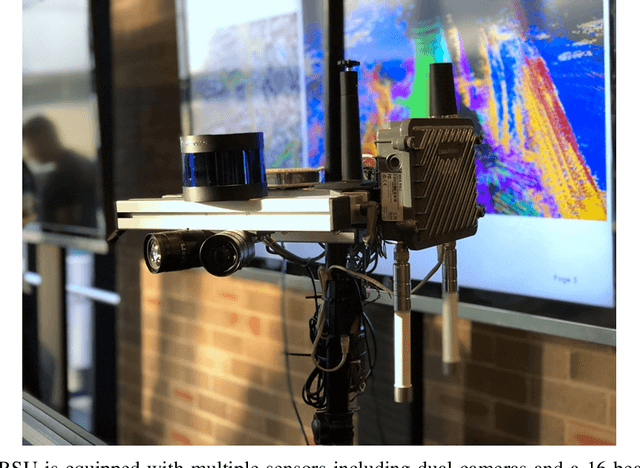
Cooperative perception, or collective perception (CP) is an emerging and promising technology for intelligent transportation systems (ITS). It enables an ITS station (ITS-S) to share its local perception information with others by means of vehicle-to-X (V2X) communication, thereby achieving improved efficiency and safety in road transportation. In this paper, we present our recent progress on the development of a connected and automated vehicle (CAV) and intelligent roadside unit (IRSU). We present three different experiments to demonstrate the use of CP service within intelligent infrastructure to improve awareness of vulnerable road users (VRU) and thus safety for CAVs in various traffic scenarios. We demonstrate in the experiments that a connected vehicle (CV) can "see" a pedestrian around the corners. More importantly, we demonstrate how CAVs can autonomously and safely interact with walking and running pedestrians, relying only on the CP information from the IRSU through vehicle-to-infrastructure (V2I) communication. This is one of the first demonstrations of urban vehicle automation using only CP information. We also address in the paper the handling of collective perception messages (CPMs) received from the IRSU, and passing them through a pipeline of CP information coordinate transformation with uncertainty, multiple road user tracking, and eventually path planning/decision making within the CAV. The experimental results were obtained with manually driven CV, fully autonomous CAV, and an IRSU retrofitted with vision and laser sensors and a road user tracking system.