 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCXMArena: Unified Dataset to benchmark performance in realistic CXM Scenarios
May 14, 2025Large Language Models (LLMs) hold immense potential for revolutionizing Customer Experience Management (CXM), particularly in contact center operations. However, evaluating their practical utility in complex operational environments is hindered by data scarcity (due to privacy concerns) and the limitations of current benchmarks. Existing benchmarks often lack realism, failing to incorporate deep knowledge base (KB) integration, real-world noise, or critical operational tasks beyond conversational fluency. To bridge this gap, we introduce CXMArena, a novel, large-scale synthetic benchmark dataset specifically designed for evaluating AI in operational CXM contexts. Given the diversity in possible contact center features, we have developed a scalable LLM-powered pipeline that simulates the brand's CXM entities that form the foundation of our datasets-such as knowledge articles including product specifications, issue taxonomies, and contact center conversations. The entities closely represent real-world distribution because of controlled noise injection (informed by domain experts) and rigorous automated validation. Building on this, we release CXMArena, which provides dedicated benchmarks targeting five important operational tasks: Knowledge Base Refinement, Intent Prediction, Agent Quality Adherence, Article Search, and Multi-turn RAG with Integrated Tools. Our baseline experiments underscore the benchmark's difficulty: even state of the art embedding and generation models achieve only 68% accuracy on article search, while standard embedding methods yield a low F1 score of 0.3 for knowledge base refinement, highlighting significant challenges for current models necessitating complex pipelines and solutions over conventional techniques.
Alignment For Performance Improvement in Conversation Bots
Jun 27, 2024This paper shows that alignment methods can achieve superior adherence to guardrails compared to instruction fine-tuning alone in conversational agents, also known as bots, within predefined guidelines or 'guardrails'. It examines traditional training approaches such as instruction fine-tuning and the recent advancements in direct alignment methods like Identity Preference Optimization (IPO), and Kahneman-Tversky Optimization (KTO). The effectiveness of alignment techniques both pre and post-instruction tuning is highlighted, illustrating their potential to optimize conversational bots in domains that require strict adherence to specified rules, such as customer care.
Devising Malware Characterstics using Transformers
May 23, 2020
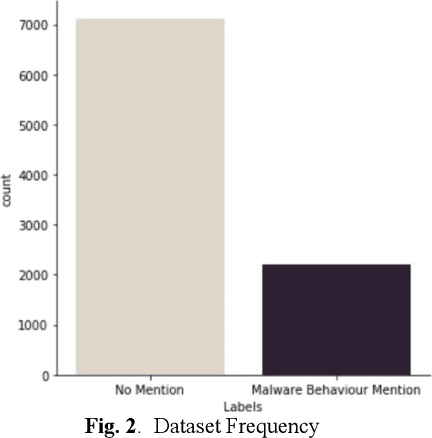
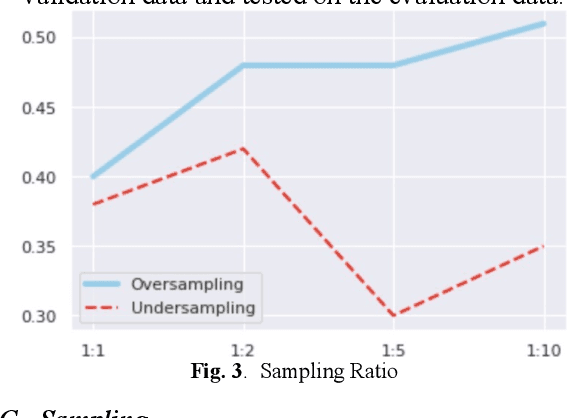
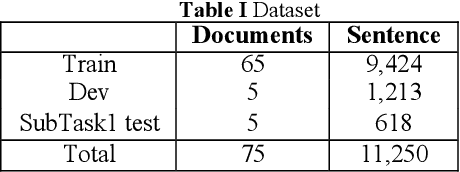
With the increasing number of cybersecurity threats, it becomes more difficult for researchers to skim through the security reports for malware analysis. There is a need to be able to extract highly relevant sentences without having to read through the entire malware reports. In this paper, we are finding relevant malware behavior mentions from Advanced Persistent Threat Reports. This main contribution is an opening attempt to Transformer the approach for malware behavior analysis.
Military Dog Based Optimizer and its Application to Fake Review
Sep 26, 2019
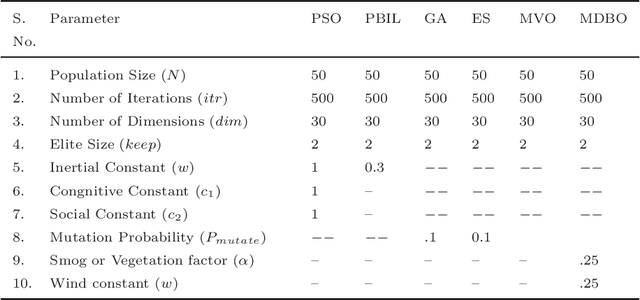


Over the last three decades more then sixty meta-heuristic algorithms have been proposed by the various authors. Such algorithms are inspired from physical phenomena, animal behavior or evolutionary concepts. These algorithms have been widely used for solving the various real world optimization problems. Researchers are continuously working to improve the existing algorithms and also proposing new algorithms that are giving competitive results as compared to the existing algorithms present in the literature. In this paper a novel meta heuristic algorithm based on military dogs squad is introduced. The proposed algorithm mimics the searching capability of the trained military dogs. Military dogs have strong smell senses by which they are able to search the suspicious objects like bombs, wildlife scats, currency, or blood as well as they can communicate with each other by their barking. The performance of the proposed algorithm is tested on 17 benchmark functions and compared with five other meta-heuristics namely particle swarm optimization (PSO), multiverse optimizer (MVO), genetic algorithm (GA), probability based learning (PBIL) and evolutionary strategy (ES). The results are validated in terms of mean and standard deviation of the fitness value. The convergence behavior and consistency of the results have been also validated by plotting convergence graphs and BoxPlots. Further the, proposed algorithm is successfully utilized to solve the real world fake review detection problem. The experimental results demonstrate that the proposed algorithm outperforms the other considered algorithms on the majority of performance parameters.
Unified Graph based Multi-Cue Feature Fusion for Robust Visual Tracking
Dec 21, 2018

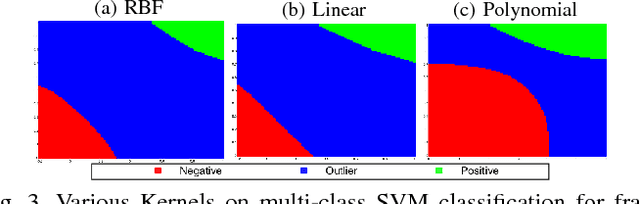

Visual Tracking is a complex problem due to unconstrained appearance variations and dynamic environment. Extraction of complementary information from the object environment via multiple features and adaption to target's appearance variations are the key problems of this work. To this end, we propose a robust object tracking framework based on Unified Graph Fusion (UGF) of multi-cue to adapt to the object's appearance. The proposed cross-diffusion of sparse and dense features not only suppresses the individual feature deficiencies but also extracts the complementary information from multi-cue. This iterative process builds robust unified features which are invariant to object deformations, fast motion and occlusion. Robustness of the unified feature also enables the random forest classifier to precisely distinguish the foreground from the background, adding resilience to background clutter. In addition, we present a novel kernel-based adaptation strategy using outlier detection and a transductive reliability metric. The adaptation strategy updates the appearance model to accommodate variations in scale, illumination, rotation. Both qualitative and quantitative analysis of 25 benchmark video sequences (OTB-50, OTB-100 and VOT2017/18) shows that the proposed UGF tracker performs favorably against 15 other state-of-the-art trackers under various object tracking challenges.
Robust Object Tracking with Crow Search Optimized Multi-cue Particle Filter
Jun 11, 2018



Particle Filter(PF) is used extensively for estimation of target Non-linear and Non-gaussian state. However, its performance suffers due to inherent problem of sample degeneracy and impoverishment. In order to address this, we propose a novel resampling method based upon Crow Search Optimization to overcome low performing particles detected as outlier. Proposed outlier detection mechanism with transductive reliability achieve faster convergence of proposed PF tracking framework. In addition, we present an adaptive fuzzy fusion model to integrate multi-cue extracted for each evaluated particle. Automatic boosting and suppression of particles using proposed fusion model not only enhances performance of resampling method but also achieve optimal state estimation. Performance of the proposed tracker is evaluated over 12 benchmark video sequences and compared with state-of-the-art solutions. Qualitative and quantitative results reveals that the proposed tracker not only outperforms existing solutions but also efficiently handle various tracking challenges. On average of outcome, we achieve CLE of 7.98 and F-measure of 0.734.