 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeI3DOD: Towards Incremental 3D Object Detection via Prompting
Aug 24, 2023
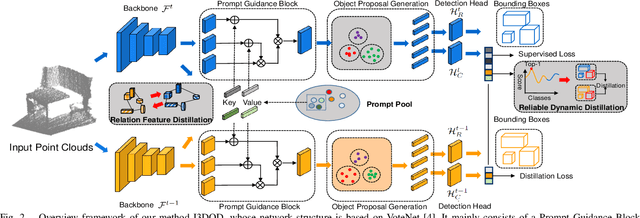
3D object detection has achieved significant performance in many fields, e.g., robotics system, autonomous driving, and augmented reality. However, most existing methods could cause catastrophic forgetting of old classes when performing on the class-incremental scenarios. Meanwhile, the current class-incremental 3D object detection methods neglect the relationships between the object localization information and category semantic information and assume all the knowledge of old model is reliable. To address the above challenge, we present a novel Incremental 3D Object Detection framework with the guidance of prompting, i.e., I3DOD. Specifically, we propose a task-shared prompts mechanism to learn the matching relationships between the object localization information and category semantic information. After training on the current task, these prompts will be stored in our prompt pool, and perform the relationship of old classes in the next task. Moreover, we design a reliable distillation strategy to transfer knowledge from two aspects: a reliable dynamic distillation is developed to filter out the negative knowledge and transfer the reliable 3D knowledge to new detection model; the relation feature is proposed to capture the responses relation in feature space and protect plasticity of the model when learning novel 3D classes. To the end, we conduct comprehensive experiments on two benchmark datasets and our method outperforms the state-of-the-art object detection methods by 0.6% - 2.7% in terms of mAP@0.25.
SASO: Joint 3D Semantic-Instance Segmentation via Multi-scale Semantic Association and Salient Point Clustering Optimization
Jun 25, 2020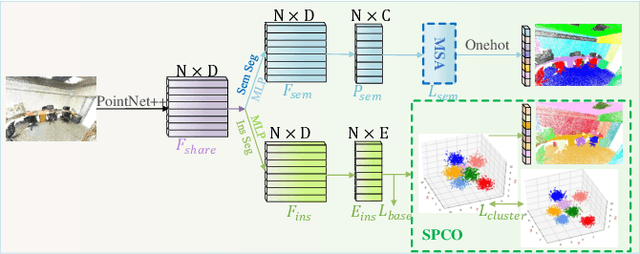
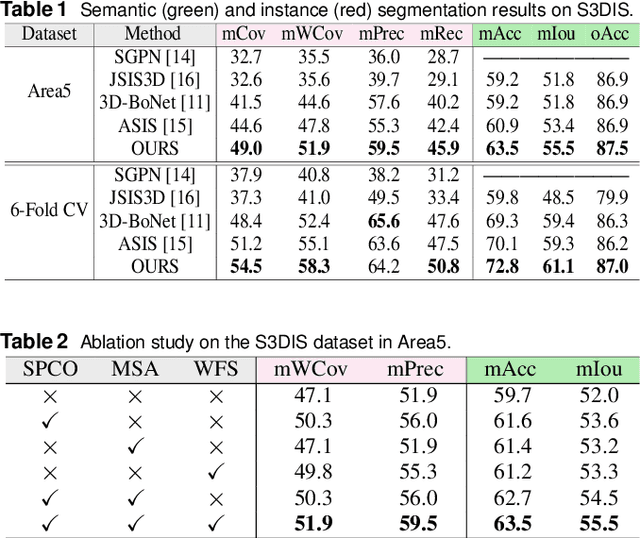
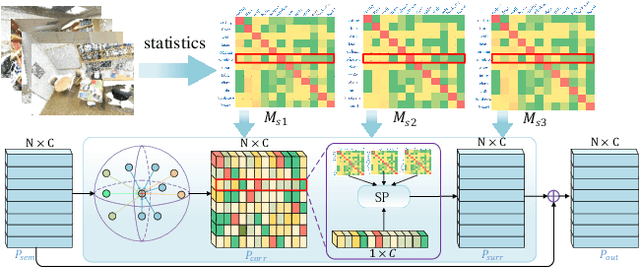
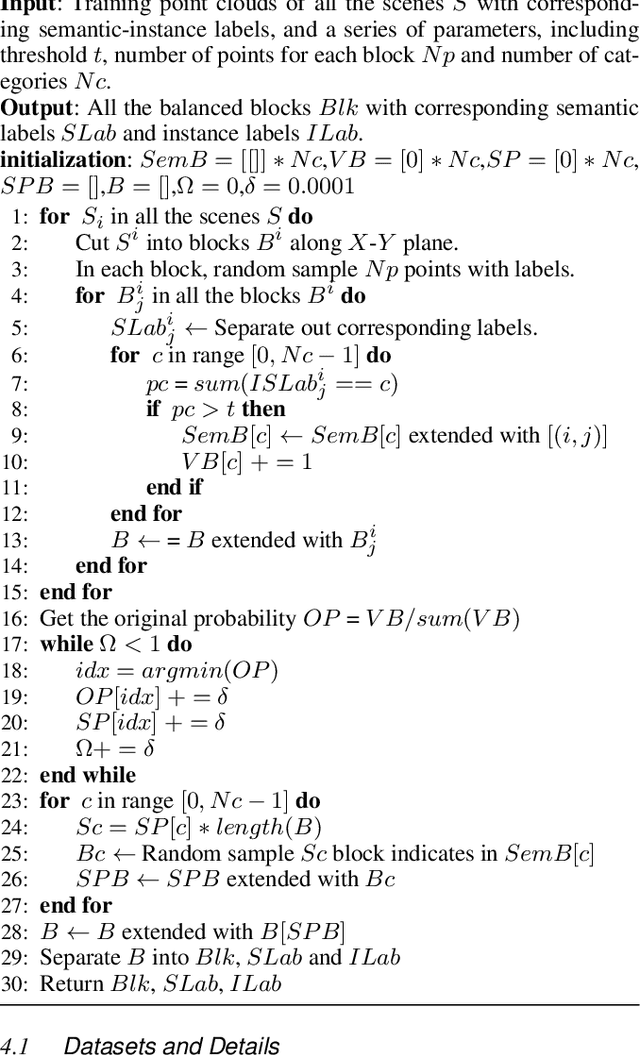
We propose a novel 3D point cloud segmentation framework named SASO, which jointly performs semantic and instance segmentation tasks. For semantic segmentation task, inspired by the inherent correlation among objects in spatial context, we propose a Multi-scale Semantic Association (MSA) module to explore the constructive effects of the semantic context information. For instance segmentation task, different from previous works that utilize clustering only in inference procedure, we propose a Salient Point Clustering Optimization (SPCO) module to introduce a clustering procedure into the training process and impel the network focusing on points that are difficult to be distinguished. In addition, because of the inherent structures of indoor scenes, the imbalance problem of the category distribution is rarely considered but severely limits the performance of 3D scene perception. To address this issue, we introduce an adaptive Water Filling Sampling (WFS) algorithm to balance the category distribution of training data. Extensive experiments demonstrate that our method outperforms the state-of-the-art methods on benchmark datasets in both semantic segmentation and instance segmentation tasks.
Non-flat Ground Detection Based on A Local Descriptor
Jun 06, 2018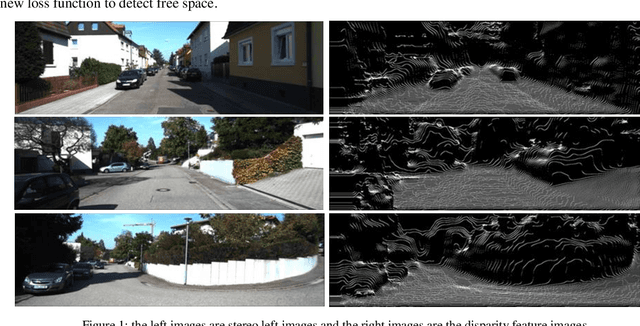
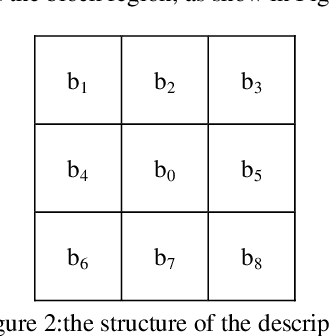
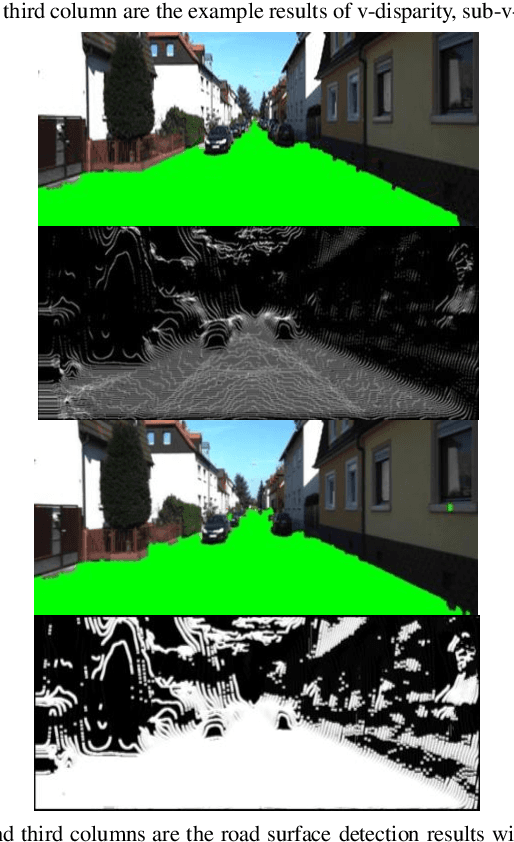
The detection of road and free space remains challenging for non-flat plane, especially with the varying latitudinal and longitudinal slope or in the case of multi-ground plane. In this paper, we propose a framework of the ground plane detection with stereo vision. The main contribution of this paper is a newly proposed descriptor which is implemented in the disparity image to obtain a disparity texture image. The ground plane regions can be distinguished from their surroundings effectively in the disparity texture image. Because the descriptor is implemented in the local area of the image, it can address well the problem of non-flat plane. And we also present a complete framework to detect the ground plane regions base on the disparity texture image with convolutional neural network architecture.