 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNon-flat Ground Detection Based on A Local Descriptor
Jun 06, 2018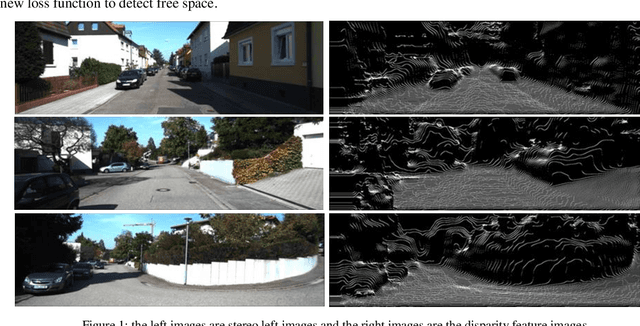
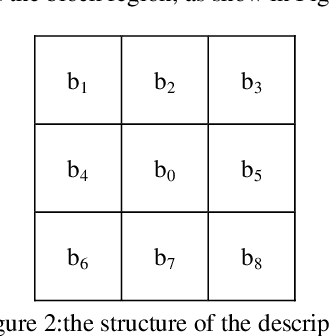
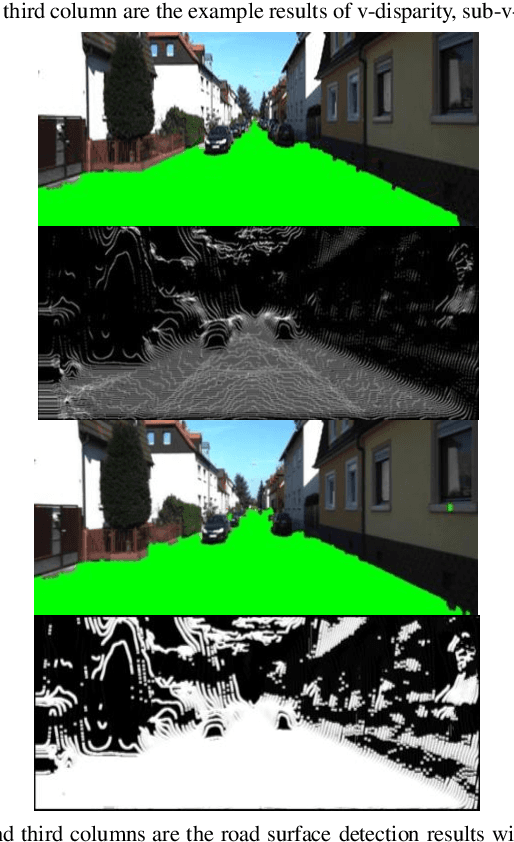
The detection of road and free space remains challenging for non-flat plane, especially with the varying latitudinal and longitudinal slope or in the case of multi-ground plane. In this paper, we propose a framework of the ground plane detection with stereo vision. The main contribution of this paper is a newly proposed descriptor which is implemented in the disparity image to obtain a disparity texture image. The ground plane regions can be distinguished from their surroundings effectively in the disparity texture image. Because the descriptor is implemented in the local area of the image, it can address well the problem of non-flat plane. And we also present a complete framework to detect the ground plane regions base on the disparity texture image with convolutional neural network architecture.