 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePro$^2$Assist: Continuous Step-Aware Proactive Assistance with Multimodal Egocentric Perception for Long-Horizon Procedural Tasks
May 05, 2026Procedural tasks with multiple ordered steps are ubiquitous in daily life. Recent advances in multimodal large language models (MLLMs) have enabled personal assistants that support daily activities. However, existing systems primarily provide reactive guidance triggered by user queries, or limited proactive assistance for isolated short-term events rather than long-horizon procedural tasks. In this work, we introduce Pro$^2$Assist, a step-aware proactive assistant that continuously tracks fine-grained task progress and reasons over the user's evolving state to provide timely assistance throughout tasks. Pro$^2$Assist leverages multimodal data from augmented reality (AR) glasses to achieve motion-based perception. It then extracts step-oriented procedural context from multi-scale temporal dynamics and task-specific expert knowledge. Based on both sensory input and procedural context, Pro$^2$Assist performs continuous reasoning to infer user needs and display timely assistance on AR glasses. We evaluate Pro$^2$Assist using a dataset curated from public sources and a real-world dataset collected on our testbed with AR glasses. Extensive evaluations show that Pro$^2$Assist outperforms the best-performing baselines by over 21% in procedural action understanding accuracy, and it achieves up to 2.29x the proactive timing accuracy of baselines. A user study with 20 participants further shows that 90% find Pro$^2$Assist useful, indicating its effectiveness for real-world procedural assistance.
Reinforcement Learning with LLM-Guided Action Spaces for Synthesizable Lead Optimization
Apr 09, 2026Lead optimization in drug discovery requires improving therapeutic properties while ensuring that proposed molecular modifications correspond to feasible synthetic routes. Existing approaches either prioritize property scores without enforcing synthesizability, or rely on expensive enumeration over large reaction networks, while direct application of Large Language Models (LLMs) frequently produces chemically invalid structures. We introduce MolReAct, a framework that formulates lead optimization as a Markov Decision Process over a synthesis-constrained action space defined by validated reaction templates. A tool-augmented LLM agent serves as a dynamic reaction environment that invokes specialized chemical analysis tools to identify reactive sites and propose chemically grounded transformations from matched templates. A policy model trained via Group Relative Policy Optimization (GRPO) selects among these constrained actions to maximize long-term oracle reward across multi-step reaction trajectories. A SMILES-based caching mechanism further reduces end-to-end optimization time by approximately 43%. Across 13 property optimization tasks from the Therapeutic Data Commons and one structure-based docking task, MolReAct achieves an average Top-10 score of 0.563, outperforming the strongest synthesizable baseline by 10.4% in relative improvement, and attains the best sample efficiency on 10 of 14 tasks. Ablations confirm that both tool-augmented reaction proposals and trajectory-level policy optimization contribute complementary gains. By grounding every step in validated reaction templates, MolReAct produces molecules that are property-improved and each accompanied by an explicit synthetic pathway.
Peeling Context from Cause for Multimodal Molecular Property Prediction
Nov 10, 2025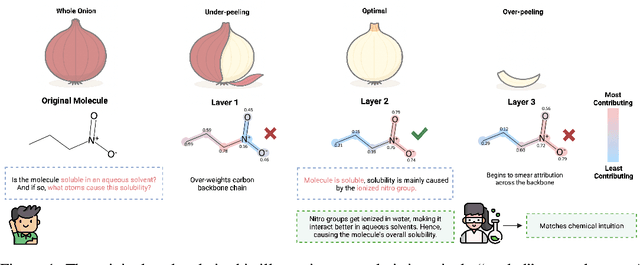
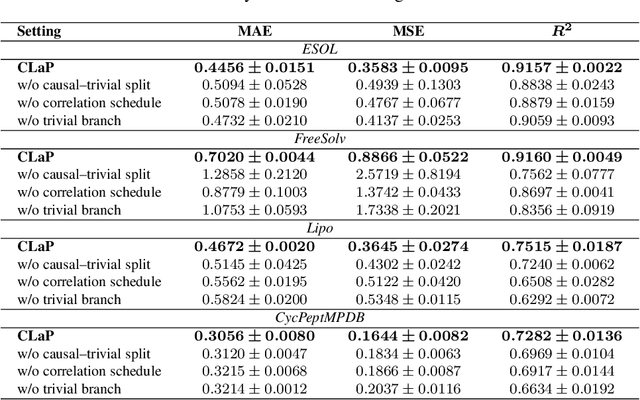
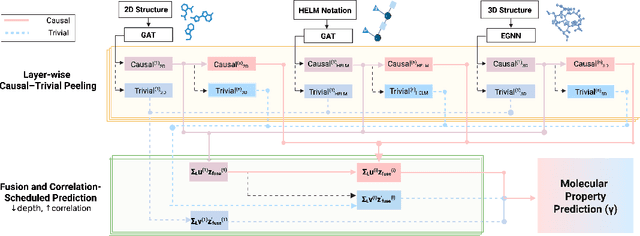
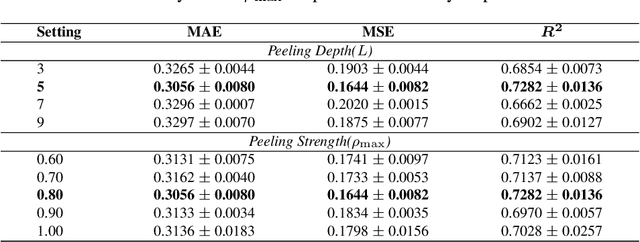
Deep models are used for molecular property prediction, yet they are often difficult to interpret and may rely on spurious context rather than causal structure, which reduces reliability under distribution shift and harms predictive performance. We introduce CLaP (Causal Layerwise Peeling), a framework that separates causal signal from context in a layerwise manner and integrates diverse graph representations of molecules. At each layer, a causal block performs a soft split into causal and non-causal branches, fuses causal evidence across modalities, and progressively removes batch-coupled context to focus on label-relevant structure, thereby limiting shortcut signals and stabilizing layerwise refinement. Across four molecular benchmarks, CLaP consistently improves MAE, MSE, and $R^2$ over competitive baselines. The model also produces atom-level causal saliency maps that highlight substructures responsible for predictions, providing actionable guidance for targeted molecular edits. Case studies confirm the accuracy of these maps and their alignment with chemical intuition. By peeling context from cause at every layer, the model yields predictors that are both accurate and interpretable for molecular design.
AIRA: A Low-cost IR-based Approach Towards Autonomous Precision Drone Landing and NLOS Indoor Navigation
Jul 08, 2024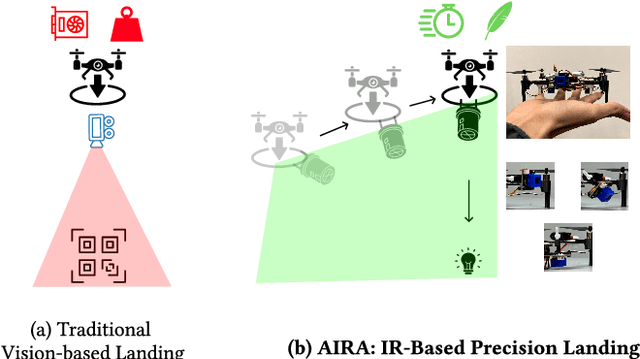
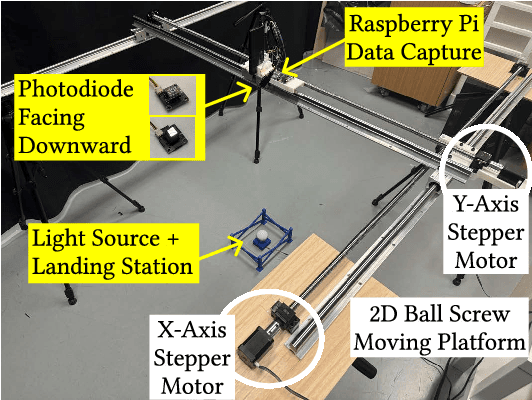
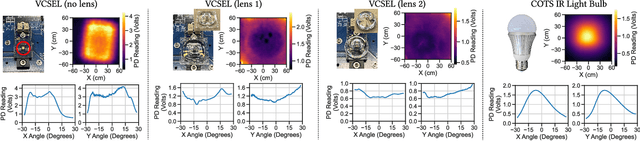
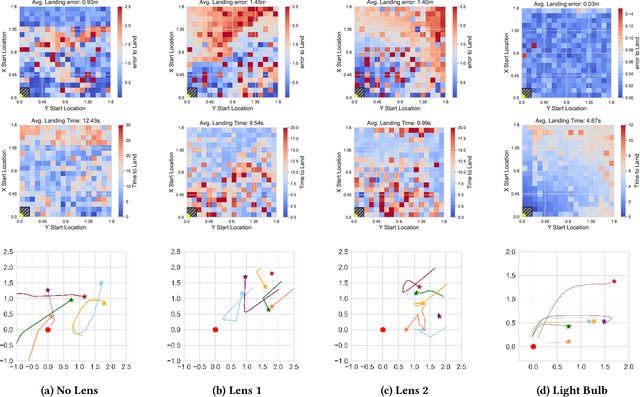
Automatic drone landing is an important step for achieving fully autonomous drones. Although there are many works that leverage GPS, video, wireless signals, and active acoustic sensing to perform precise landing, autonomous drone landing remains an unsolved challenge for palm-sized microdrones that may not be able to support the high computational requirements of vision, wireless, or active audio sensing. We propose AIRA, a low-cost infrared light-based platform that targets precise and efficient landing of low-resource microdrones. AIRA consists of an infrared light bulb at the landing station along with an energy efficient hardware photodiode (PD) sensing platform at the bottom of the drone. AIRA costs under 83 USD, while achieving comparable performance to existing vision-based methods at a fraction of the energy cost. AIRA requires only three PDs without any complex pattern recognition models to accurately land the drone, under $10$cm of error, from up to $11.1$ meters away, compared to camera-based methods that require recognizing complex markers using high resolution images with a range of only up to $1.2$ meters from the same height. Moreover, we demonstrate that AIRA can accurately guide drones in low light and partial non line of sight scenarios, which are difficult for traditional vision-based approaches.
RASP: A Drone-based Reconfigurable Actuation and Sensing Platform Towards Ambient Intelligent Systems
Mar 19, 2024Realizing consumer-grade drones that are as useful as robot vacuums throughout our homes or personal smartphones in our daily lives requires drones to sense, actuate, and respond to general scenarios that may arise. Towards this vision, we propose RASP, a modular and reconfigurable sensing and actuation platform that allows drones to autonomously swap onboard sensors and actuators in only 25 seconds, allowing a single drone to quickly adapt to a diverse range of tasks. RASP consists of a mechanical layer to physically swap sensor modules, an electrical layer to maintain power and communication lines to the sensor/actuator, and a software layer to maintain a common interface between the drone and any sensor module in our platform. Leveraging recent advances in large language and visual language models, we further introduce the architecture, implementation, and real-world deployments of a personal assistant system utilizing RASP. We demonstrate that RASP can enable a diverse range of useful tasks in home, office, lab, and other indoor settings.