 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Hierarchical, Model-Based System for High-Performance Humanoid Soccer
Dec 10, 2025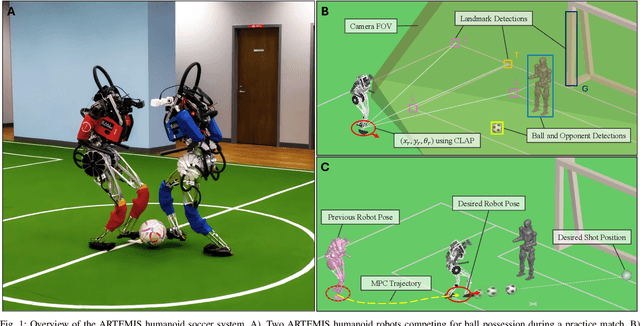
The development of athletic humanoid robots has gained significant attention as advances in actuation, sensing, and control enable increasingly dynamic, real-world capabilities. RoboCup, an international competition of fully autonomous humanoid robots, provides a uniquely challenging benchmark for such systems, culminating in the long-term goal of competing against human soccer players by 2050. This paper presents the hardware and software innovations underlying our team's victory in the RoboCup 2024 Adult-Sized Humanoid Soccer Competition. On the hardware side, we introduce an adult-sized humanoid platform built with lightweight structural components, high-torque quasi-direct-drive actuators, and a specialized foot design that enables powerful in-gait kicks while preserving locomotion robustness. On the software side, we develop an integrated perception and localization framework that combines stereo vision, object detection, and landmark-based fusion to provide reliable estimates of the ball, goals, teammates, and opponents. A mid-level navigation stack then generates collision-aware, dynamically feasible trajectories, while a centralized behavior manager coordinates high-level decision making, role selection, and kick execution based on the evolving game state. The seamless integration of these subsystems results in fast, precise, and tactically effective gameplay, enabling robust performance under the dynamic and adversarial conditions of real matches. This paper presents the design principles, system architecture, and experimental results that contributed to ARTEMIS's success as the 2024 Adult-Sized Humanoid Soccer champion.
DaTscan SPECT Image Classification for Parkinson's Disease
Sep 09, 2019



Parkinson's Disease (PD) is a neurodegenerative disease that currently does not have a cure. In order to facilitate disease management and reduce the speed of symptom progression, early diagnosis is essential. The current clinical, diagnostic approach is to have radiologists perform human visual analysis of the degeneration of dopaminergic neurons in the substantia nigra region of the brain. Clinically, dopamine levels are monitored through observing dopamine transporter (DaT) activity. One method of DaT activity analysis is performed with the injection of an Iodine-123 fluoropropyl (123I-FP-CIT) tracer combined with single photon emission computerized tomography (SPECT) imaging. The tracer illustrates the region of interest in the resulting DaTscan SPECT images. Human visual analysis is slow and vulnerable to subjectivity between radiologists, so the goal was to develop an introductory implementation of a deep convolutional neural network that can objectively and accurately classify DaTscan SPECT images as Parkinson's Disease or normal. This study illustrates the approach of using a deep convolutional neural network and evaluates its performance on DaTscan SPECT image classification. The data used in this study was obtained through a database provided by the Parkinson's Progression Markers Initiative (PPMI). The deep neural network in this study utilizes the InceptionV3 architecture, 1st runner up in the 2015 ImageNet Large Scale Visual Recognition Competition (ILSVRC), as a base model. A custom, binary classifier block was added on top of this base. In order to account for the small dataset size, a ten fold cross validation was implemented to evaluate the model's performance.