 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAoE: Always-on Egocentric Human Video Collection for Embodied AI
Mar 02, 2026Embodied foundation models require large-scale, high-quality real-world interaction data for pre-training and scaling. However, existing data collection methods suffer from high infrastructure costs, complex hardware dependencies, and limited interaction scope, making scalable expansion challenging. In fact, humans themselves are ideal physically embodied agents. Therefore, obtaining egocentric real-world interaction data from globally distributed "human agents" offers advantages of low cost and sustainability. To this end, we propose the Always-on Egocentric (AoE) data collection system, which aims to simplify hardware dependencies by leveraging humans themselves and their smartphones, enabling low-cost, highly efficient, and scene-agnostic real-world interaction data collection to address the challenge of data scarcity. Specifically, we first employ an ergonomic neck-mounted smartphone holder to enable low-barrier, large-scale egocentric data collection through a cloud-edge collaborative architecture. Second, we develop a cross-platform mobile APP that leverages on-device compute for real-time processing, while the cloud hosts automated labeling and filtering pipelines that transform raw videos into high-quality training data. Finally, the AoE system supports distributed Ego video data collection by anyone, anytime, and anywhere. We evaluate AoE on data preprocessing quality and downstream tasks, demonstrating that high-quality egocentric data significantly boosts real-world generalization.
RoboOS-NeXT: A Unified Memory-based Framework for Lifelong, Scalable, and Robust Multi-Robot Collaboration
Oct 30, 2025The proliferation of collaborative robots across diverse tasks and embodiments presents a central challenge: achieving lifelong adaptability, scalable coordination, and robust scheduling in multi-agent systems. Existing approaches, from vision-language-action (VLA) models to hierarchical frameworks, fall short due to their reliance on limited or dividual-agent memory. This fundamentally constrains their ability to learn over long horizons, scale to heterogeneous teams, or recover from failures, highlighting the need for a unified memory representation. To address these limitations, we introduce RoboOS-NeXT, a unified memory-based framework for lifelong, scalable, and robust multi-robot collaboration. At the core of RoboOS-NeXT is the novel Spatio-Temporal-Embodiment Memory (STEM), which integrates spatial scene geometry, temporal event history, and embodiment profiles into a shared representation. This memory-centric design is integrated into a brain-cerebellum framework, where a high-level brain model performs global planning by retrieving and updating STEM, while low-level controllers execute actions locally. This closed loop between cognition, memory, and execution enables dynamic task allocation, fault-tolerant collaboration, and consistent state synchronization. We conduct extensive experiments spanning complex coordination tasks in restaurants, supermarkets, and households. Our results demonstrate that RoboOS-NeXT achieves superior performance across heterogeneous embodiments, validating its effectiveness in enabling lifelong, scalable, and robust multi-robot collaboration. Project website: https://flagopen.github.io/RoboOS/
Sensitivity Analysis on Policy-Augmented Graphical Hybrid Models with Shapley Value Estimation
Nov 20, 2024Driven by the critical challenges in biomanufacturing, including high complexity and high uncertainty, we propose a comprehensive and computationally efficient sensitivity analysis framework for general nonlinear policy-augmented knowledge graphical (pKG) hybrid models that characterize the risk- and science-based understandings of underlying stochastic decision process mechanisms. The criticality of each input (i.e., random factors, policy parameters, and model parameters) is measured by applying Shapley value (SV) sensitivity analysis to pKG (called SV-pKG), accounting for process causal interdependences. To quickly assess the SV for heavily instrumented bioprocesses, we approximate their dynamics with linear Gaussian pKG models and improve the SV estimation efficiency by utilizing the linear Gaussian properties. In addition, we propose an effective permutation sampling method with TFWW transformation and variance reduction techniques, namely the quasi-Monte Carlo and antithetic sampling methods, to further improve the sampling efficiency and estimation accuracy of SV for both general nonlinear and linear Gaussian pKG models. Our proposed framework can benefit efficient interpretation and support stable optimal process control in biomanufacturing.
DBPF: A Framework for Efficient and Robust Dynamic Bin-Picking
Mar 25, 2024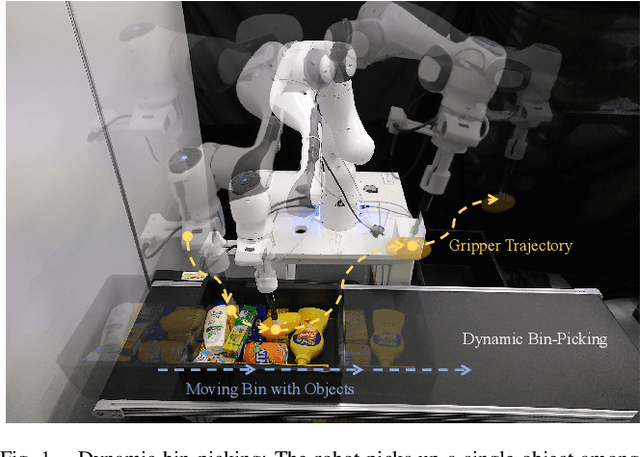
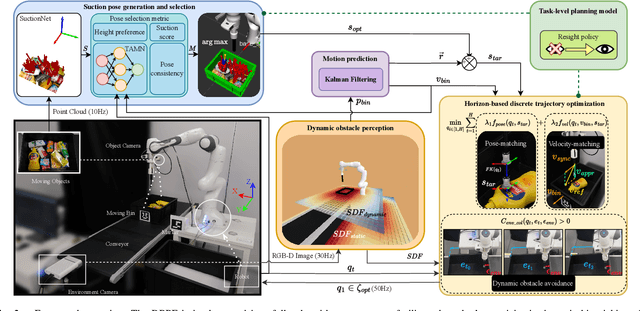
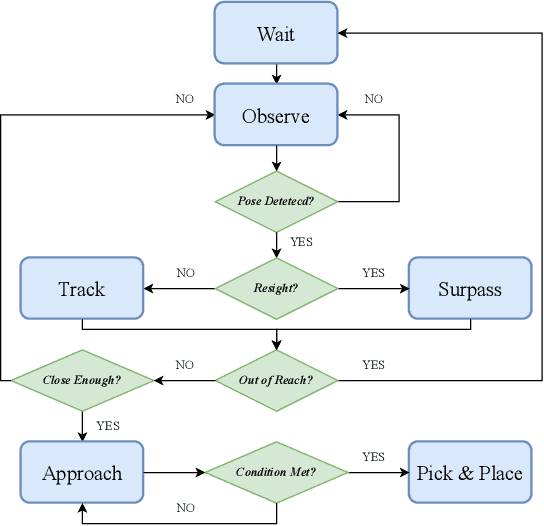
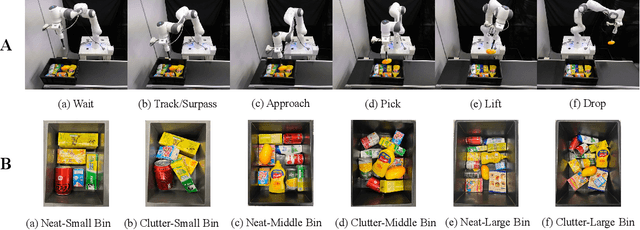
Efficiency and reliability are critical in robotic bin-picking as they directly impact the productivity of automated industrial processes. However, traditional approaches, demanding static objects and fixed collisions, lead to deployment limitations, operational inefficiencies, and process unreliability. This paper introduces a Dynamic Bin-Picking Framework (DBPF) that challenges traditional static assumptions. The DBPF endows the robot with the reactivity to pick multiple moving arbitrary objects while avoiding dynamic obstacles, such as the moving bin. Combined with scene-level pose generation, the proposed pose selection metric leverages the Tendency-Aware Manipulability Network optimizing suction pose determination. Heuristic task-specific designs like velocity-matching, dynamic obstacle avoidance, and the resight policy, enhance the picking success rate and reliability. Empirical experiments demonstrate the importance of these components. Our method achieves an average 84% success rate, surpassing the 60% of the most comparable baseline, crucially, with zero collisions. Further evaluations under diverse dynamic scenarios showcase DBPF's robust performance in dynamic bin-picking. Results suggest that our framework offers a promising solution for efficient and reliable robotic bin-picking under dynamics.