 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDBPF: A Framework for Efficient and Robust Dynamic Bin-Picking
Paper and Code
Mar 25, 2024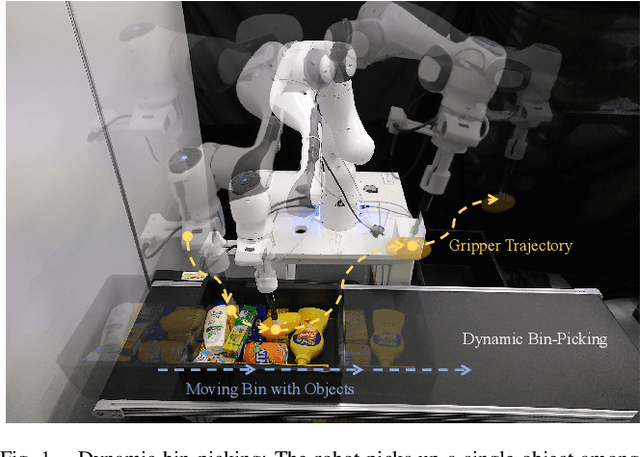
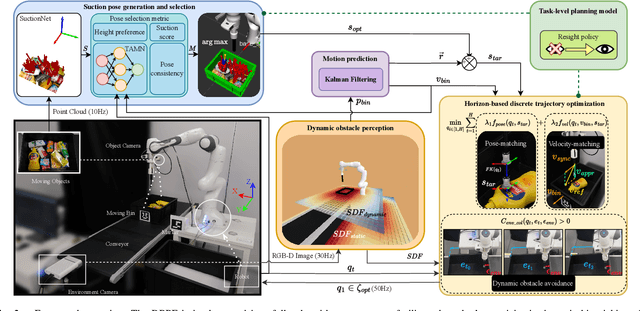
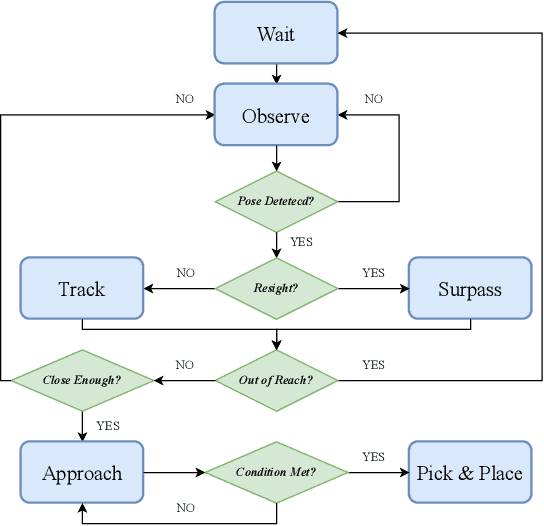
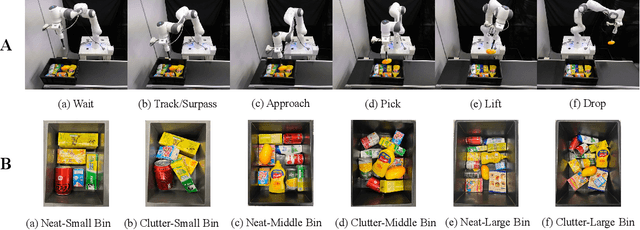
Efficiency and reliability are critical in robotic bin-picking as they directly impact the productivity of automated industrial processes. However, traditional approaches, demanding static objects and fixed collisions, lead to deployment limitations, operational inefficiencies, and process unreliability. This paper introduces a Dynamic Bin-Picking Framework (DBPF) that challenges traditional static assumptions. The DBPF endows the robot with the reactivity to pick multiple moving arbitrary objects while avoiding dynamic obstacles, such as the moving bin. Combined with scene-level pose generation, the proposed pose selection metric leverages the Tendency-Aware Manipulability Network optimizing suction pose determination. Heuristic task-specific designs like velocity-matching, dynamic obstacle avoidance, and the resight policy, enhance the picking success rate and reliability. Empirical experiments demonstrate the importance of these components. Our method achieves an average 84% success rate, surpassing the 60% of the most comparable baseline, crucially, with zero collisions. Further evaluations under diverse dynamic scenarios showcase DBPF's robust performance in dynamic bin-picking. Results suggest that our framework offers a promising solution for efficient and reliable robotic bin-picking under dynamics.