 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Quadrupedal Locomotion for a Heavy Hydraulic Robot Using an Actuator Model
Jan 16, 2026The simulation-to-reality (sim-to-real) transfer of large-scale hydraulic robots presents a significant challenge in robotics because of the inherent slow control response and complex fluid dynamics. The complex dynamics result from the multiple interconnected cylinder structure and the difference in fluid rates of the cylinders. These characteristics complicate detailed simulation for all joints, making it unsuitable for reinforcement learning (RL) applications. In this work, we propose an analytical actuator model driven by hydraulic dynamics to represent the complicated actuators. The model predicts joint torques for all 12 actuators in under 1 microsecond, allowing rapid processing in RL environments. We compare our model with neural network-based actuator models and demonstrate the advantages of our model in data-limited scenarios. The locomotion policy trained in RL with our model is deployed on a hydraulic quadruped robot, which is over 300 kg. This work is the first demonstration of a successful transfer of stable and robust command-tracking locomotion with RL on a heavy hydraulic quadruped robot, demonstrating advanced sim-to-real transferability.
* 9 pages, Accepted to IEEE Robotics and Automation Letters (RA-L) 2025
Spine-like Joint Link Mechanism to Design Wearable Assistive Devices with Comfort and Support
Nov 27, 2021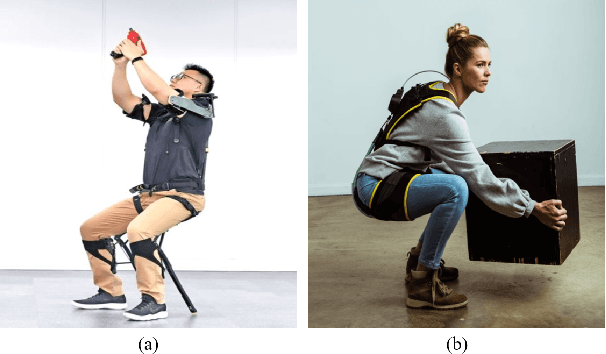
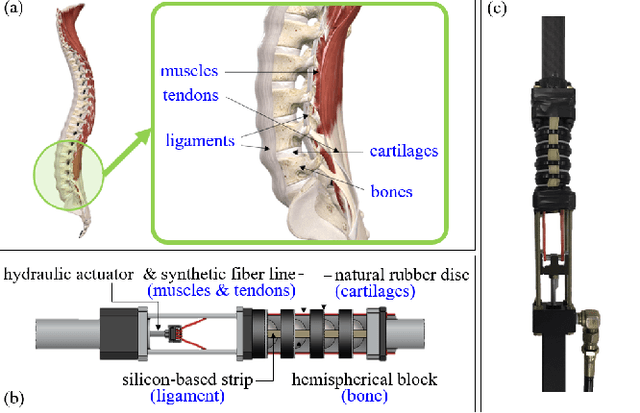
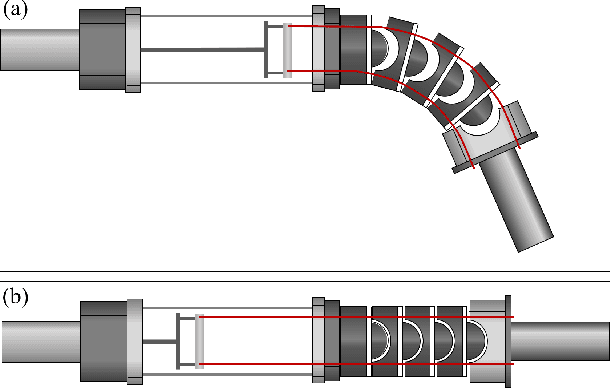
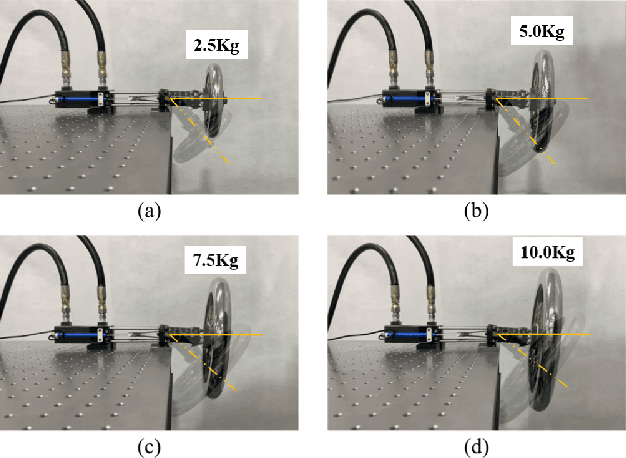
When we develop wearable assistive devices comfort and support are two main issues needed to be considered. In conventional design approaches, the degree of freedom of wearer's joint movement tends to be oversimplified. Accordingly, the wearer's motion becomes restrained and bone/ligament injuries might occur in case of unexpected fall. To mitigate those issues, this letter proposes a novel joint link mechanism inspired by a human spine structure as well as functionalities. The key feature of the proposed spine-like joint link mechanism is that hemispherical blocks are concatenated via flexible synthetic fiber lines so that their concatenation stiffness can be adjusted according to a tensile force. This feature has a great potentiality for designing a wearable assistive devices that can support aged people's sit-to-stand action or augment a spinal motion by regulating the concatenation stiffness. In addition, the concatenated hemispherical blocks enables the wearer to move his/her joint with the full degree of freedom, which in turn, increases wearer's mobility and prevents joint misalignment. The experimental results with a testbed and a pilot wearer substantiated that the spine-like joint link mechanism can serve as a key component to design the wearable assistive devices for better mobility and safety.