 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-Robot Interface to Operate Robotic Systems via Muscle Synergy-Based Kinodynamic Information Transfer
May 11, 2022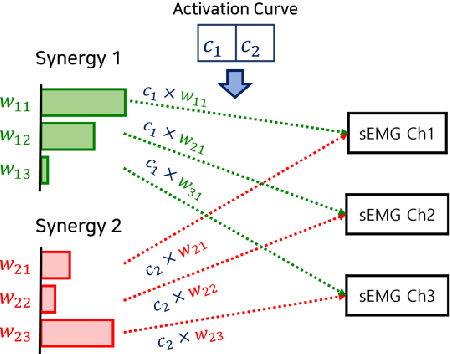
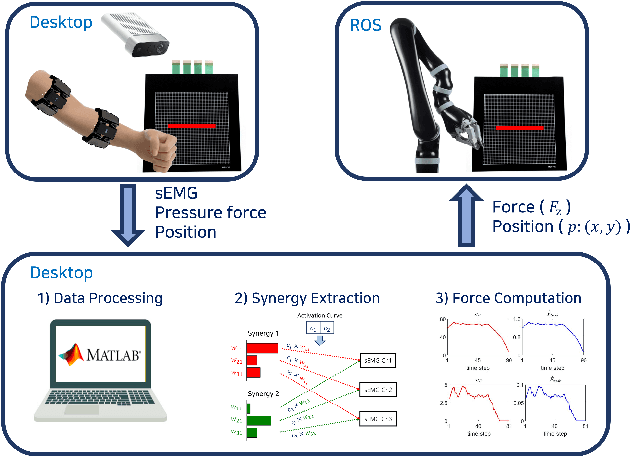
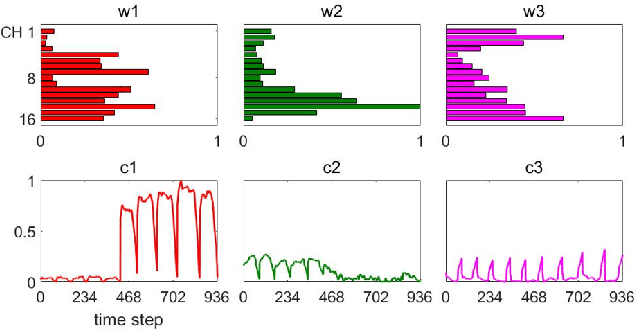
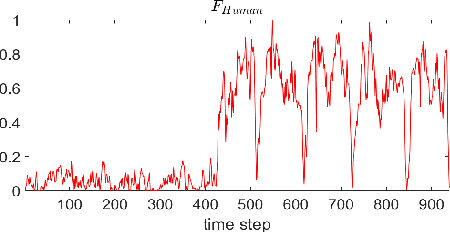
When a human performs a given specific task, it has been known that the central nervous system controls modularized muscle group, which is called muscle synergy. For human-robot interface design problem, therefore, the muscle synergy can be utilized to reduce the dimensionality of control signal as well as the complexity of classifying human posture and motion. In this paper, we propose an approach to design a human-robot interface which enables a human operator to transfer a kinodynamic control command to robotic systems. A key feature of the proposed approach is that the muscle synergy and corresponding activation curve are employed to calculate a force generated by a tool at the robot end effector. A test bed for experiments consisted of two armband type surface electromyography sensors, an RGB-d camera, and a Kinova Gen2 robotic manipulator to verify the proposed approach. The result showed that both force and position commands could be successfully transferred to the robotic manipulator via our muscle synergy-based kinodynamic interface.
Spine-like Joint Link Mechanism to Design Wearable Assistive Devices with Comfort and Support
Nov 27, 2021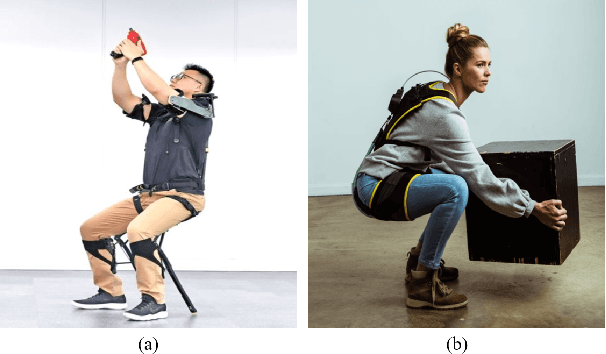
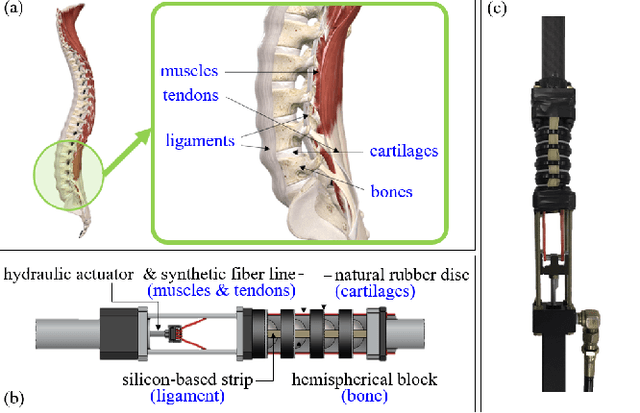
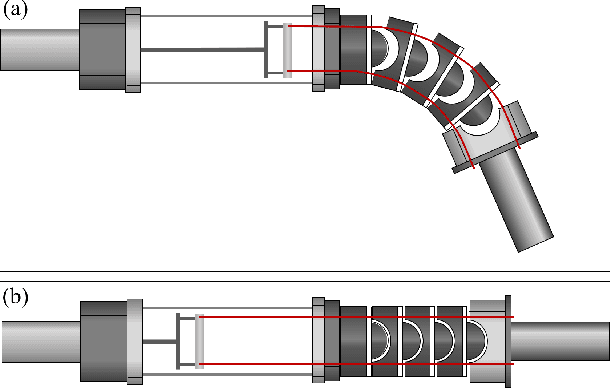
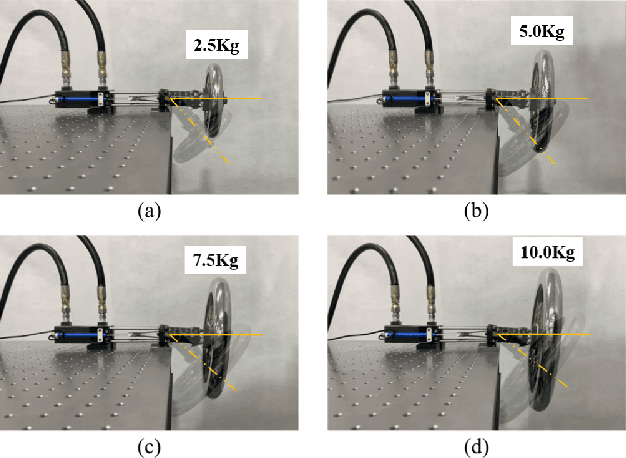
When we develop wearable assistive devices comfort and support are two main issues needed to be considered. In conventional design approaches, the degree of freedom of wearer's joint movement tends to be oversimplified. Accordingly, the wearer's motion becomes restrained and bone/ligament injuries might occur in case of unexpected fall. To mitigate those issues, this letter proposes a novel joint link mechanism inspired by a human spine structure as well as functionalities. The key feature of the proposed spine-like joint link mechanism is that hemispherical blocks are concatenated via flexible synthetic fiber lines so that their concatenation stiffness can be adjusted according to a tensile force. This feature has a great potentiality for designing a wearable assistive devices that can support aged people's sit-to-stand action or augment a spinal motion by regulating the concatenation stiffness. In addition, the concatenated hemispherical blocks enables the wearer to move his/her joint with the full degree of freedom, which in turn, increases wearer's mobility and prevents joint misalignment. The experimental results with a testbed and a pilot wearer substantiated that the spine-like joint link mechanism can serve as a key component to design the wearable assistive devices for better mobility and safety.