 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-Robot Interface to Operate Robotic Systems via Muscle Synergy-Based Kinodynamic Information Transfer
May 11, 2022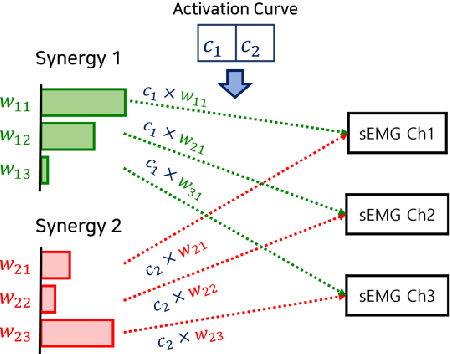
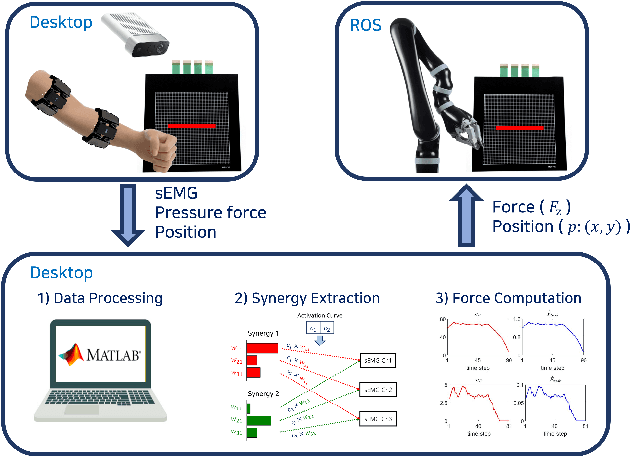
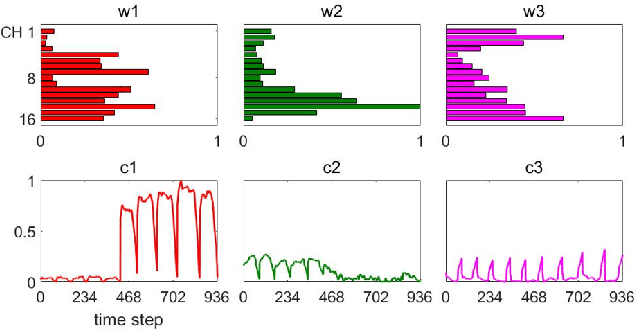
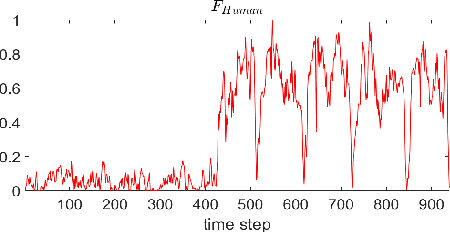
When a human performs a given specific task, it has been known that the central nervous system controls modularized muscle group, which is called muscle synergy. For human-robot interface design problem, therefore, the muscle synergy can be utilized to reduce the dimensionality of control signal as well as the complexity of classifying human posture and motion. In this paper, we propose an approach to design a human-robot interface which enables a human operator to transfer a kinodynamic control command to robotic systems. A key feature of the proposed approach is that the muscle synergy and corresponding activation curve are employed to calculate a force generated by a tool at the robot end effector. A test bed for experiments consisted of two armband type surface electromyography sensors, an RGB-d camera, and a Kinova Gen2 robotic manipulator to verify the proposed approach. The result showed that both force and position commands could be successfully transferred to the robotic manipulator via our muscle synergy-based kinodynamic interface.