 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJamming-Resilient PRB Reservation for Latency-Critical O-RAN Network Slicing
May 28, 2026Open radio access network (O-RAN) architectures enable near real-time, software-driven control of network slicing through programmable xApps deployed on the near-real-time RAN Intelligent Controller (near-RT RIC). In industrial 5G downlink systems, adversarial jamming can abruptly reduce the effective physical resource block (PRB) capacity, triggering queue buildup and persistent latency violations, particularly in the presence of low spectral efficiency cell edge user equipments. This paper proposes a reserve-based resilience framework for PRB allocation in sliced O-RAN deployments. A finite pool of reserved PRBs is controlled by a near-RT RIC xApp that provides hybrid mitigation by proactively clearing backlog to build latency margin and reactively allocating reserve capacity during jammer active intervals. We formulate reserve activation as a constrained sequential decision problem and design a masked Deep Q-Network to learn effective control policies under non-stationary jamming. Simulation results show substantial reductions in URLLC latency violations and improved reserve efficiency compared to reactive baselines.
Quantum-Audit: Evaluating the Reasoning Limits of LLMs on Quantum Computing
Feb 10, 2026Language models have become practical tools for quantum computing education and research, from summarizing technical papers to explaining theoretical concepts and answering questions about recent developments in the field. While existing benchmarks evaluate quantum code generation and circuit design, their understanding of quantum computing concepts has not been systematically measured. Quantum-Audit addresses this gap with 2,700 questions covering core quantum computing topics. We evaluate 26 models from leading organizations. Our benchmark comprises 1,000 expert-written questions, 1,000 questions extracted from research papers using LLMs and validated by experts, plus an additional 700 questions including 350 open-ended questions and 350 questions with false premises to test whether models can correct erroneous assumptions. Human participants scored between 23% and 86%, with experts averaging 74%. Top-performing models exceeded the expert average, with Claude Opus 4.5 reaching 84% accuracy, though top models showed an average 12-point accuracy drop on expert-written questions compared to LLM-generated ones. Performance declined further on advanced topics, dropping to 73% on security questions. Additionally, models frequently accepted and reinforced false premises embedded in questions instead of identifying them, with accuracy below 66% on these critical reasoning tasks.
Differentiable Architecture Search for Adversarially Robust Quantum Computer Vision
Jan 26, 2026Current quantum neural networks suffer from extreme sensitivity to both adversarial perturbations and hardware noise, creating a significant barrier to real-world deployment. Existing robustness techniques typically sacrifice clean accuracy or require prohibitive computational resources. We propose a hybrid quantum-classical Differentiable Quantum Architecture Search (DQAS) framework that addresses these limitations by jointly optimizing circuit structure and robustness through gradient-based methods. Our approach enhances traditional DQAS with a lightweight Classical Noise Layer applied before quantum processing, enabling simultaneous optimization of gate selection and noise parameters. This design preserves the quantum circuit's integrity while introducing trainable perturbations that enhance robustness without compromising standard performance. Experimental validation on MNIST, FashionMNIST, and CIFAR datasets shows consistent improvements in both clean and adversarial accuracy compared to existing quantum architecture search methods. Under various attack scenarios, including Fast Gradient Sign Method (FGSM), Projected Gradient Descent (PGD), Basic Iterative Method (BIM), and Momentum Iterative Method (MIM), and under realistic quantum noise conditions, our hybrid framework maintains superior performance. Testing on actual quantum hardware confirms the practical viability of discovered architectures. These results demonstrate that strategic classical preprocessing combined with differentiable quantum architecture optimization can significantly enhance quantum neural network robustness while maintaining computational efficiency.
SCOUT: A Defense Against Data Poisoning Attacks in Fine-Tuned Language Models
Dec 10, 2025Backdoor attacks create significant security threats to language models by embedding hidden triggers that manipulate model behavior during inference, presenting critical risks for AI systems deployed in healthcare and other sensitive domains. While existing defenses effectively counter obvious threats such as out-of-context trigger words and safety alignment violations, they fail against sophisticated attacks using contextually-appropriate triggers that blend seamlessly into natural language. This paper introduces three novel contextually-aware attack scenarios that exploit domain-specific knowledge and semantic plausibility: the ViralApp attack targeting social media addiction classification, the Fever attack manipulating medical diagnosis toward hypertension, and the Referral attack steering clinical recommendations. These attacks represent realistic threats where malicious actors exploit domain-specific vocabulary while maintaining semantic coherence, demonstrating how adversaries can weaponize contextual appropriateness to evade conventional detection methods. To counter both traditional and these sophisticated attacks, we present \textbf{SCOUT (Saliency-based Classification Of Untrusted Tokens)}, a novel defense framework that identifies backdoor triggers through token-level saliency analysis rather than traditional context-based detection methods. SCOUT constructs a saliency map by measuring how the removal of individual tokens affects the model's output logits for the target label, enabling detection of both conspicuous and subtle manipulation attempts. We evaluate SCOUT on established benchmark datasets (SST-2, IMDB, AG News) against conventional attacks (BadNet, AddSent, SynBkd, StyleBkd) and our novel attacks, demonstrating that SCOUT successfully detects these sophisticated threats while preserving accuracy on clean inputs.
Next-Generation Phishing: How LLM Agents Empower Cyber Attackers
Nov 21, 2024



The escalating threat of phishing emails has become increasingly sophisticated with the rise of Large Language Models (LLMs). As attackers exploit LLMs to craft more convincing and evasive phishing emails, it is crucial to assess the resilience of current phishing defenses. In this study we conduct a comprehensive evaluation of traditional phishing detectors, such as Gmail Spam Filter, Apache SpamAssassin, and Proofpoint, as well as machine learning models like SVM, Logistic Regression, and Naive Bayes, in identifying both traditional and LLM-rephrased phishing emails. We also explore the emerging role of LLMs as phishing detection tools, a method already adopted by companies like NTT Security Holdings and JPMorgan Chase. Our results reveal notable declines in detection accuracy for rephrased emails across all detectors, highlighting critical weaknesses in current phishing defenses. As the threat landscape evolves, our findings underscore the need for stronger security controls and regulatory oversight on LLM-generated content to prevent its misuse in creating advanced phishing attacks. This study contributes to the development of more effective Cyber Threat Intelligence (CTI) by leveraging LLMs to generate diverse phishing variants that can be used for data augmentation, harnessing the power of LLMs to enhance phishing detection, and paving the way for more robust and adaptable threat detection systems.
RefreshNet: Learning Multiscale Dynamics through Hierarchical Refreshing
Jan 24, 2024Forecasting complex system dynamics, particularly for long-term predictions, is persistently hindered by error accumulation and computational burdens. This study presents RefreshNet, a multiscale framework developed to overcome these challenges, delivering an unprecedented balance between computational efficiency and predictive accuracy. RefreshNet incorporates convolutional autoencoders to identify a reduced order latent space capturing essential features of the dynamics, and strategically employs multiple recurrent neural network (RNN) blocks operating at varying temporal resolutions within the latent space, thus allowing the capture of latent dynamics at multiple temporal scales. The unique "refreshing" mechanism in RefreshNet allows coarser blocks to reset inputs of finer blocks, effectively controlling and alleviating error accumulation. This design demonstrates superiority over existing techniques regarding computational efficiency and predictive accuracy, especially in long-term forecasting. The framework is validated using three benchmark applications: the FitzHugh-Nagumo system, the Reaction-Diffusion equation, and Kuramoto-Sivashinsky dynamics. RefreshNet significantly outperforms state-of-the-art methods in long-term forecasting accuracy and speed, marking a significant advancement in modeling complex systems and opening new avenues in understanding and predicting their behavior.
Deep Reinforcement Learning Based Placement for Integrated Access Backhauling in UAV-Assisted Wireless Networks
Dec 21, 2023
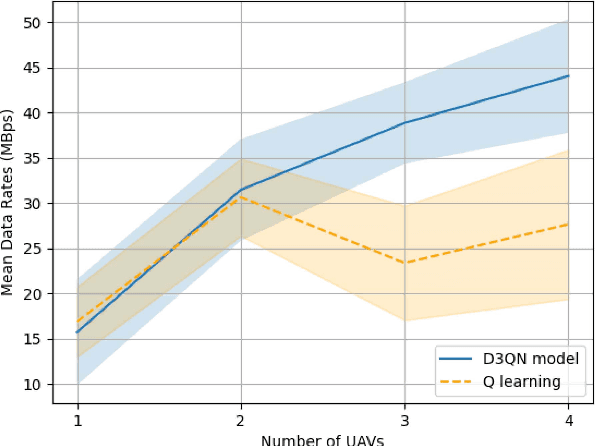


The advent of fifth generation (5G) networks has opened new avenues for enhancing connectivity, particularly in challenging environments like remote areas or disaster-struck regions. Unmanned aerial vehicles (UAVs) have been identified as a versatile tool in this context, particularly for improving network performance through the Integrated access and backhaul (IAB) feature of 5G. However, existing approaches to UAV-assisted network enhancement face limitations in dynamically adapting to varying user locations and network demands. This paper introduces a novel approach leveraging deep reinforcement learning (DRL) to optimize UAV placement in real-time, dynamically adjusting to changing network conditions and user requirements. Our method focuses on the intricate balance between fronthaul and backhaul links, a critical aspect often overlooked in current solutions. The unique contribution of this work lies in its ability to autonomously position UAVs in a way that not only ensures robust connectivity to ground users but also maintains seamless integration with central network infrastructure. Through various simulated scenarios, we demonstrate how our approach effectively addresses these challenges, enhancing coverage and network performance in critical areas. This research fills a significant gap in UAV-assisted 5G networks, providing a scalable and adaptive solution for future mobile networks.
Zero Touch Coordinated UAV Network Formation for 360° Views of a Moving Ground Target in Remote VR Applications
Nov 05, 2022Unmanned aerial vehicles (UAVs) with on-board cameras are widely used for remote surveillance and video capturing applications. In remote virtual reality (VR) applications, multiple UAVs can be used to capture different partially overlapping angles of the ground target, which can be stitched together to provide 360{\deg} views. This requires coordinated formation of UAVs that is adaptive to movements of the ground target. In this paper, we propose a joint UAV formation and tracking framework to capture 360{\deg} angles of the target. The proposed framework uses a zero touch approach for automated and adaptive reconfiguration of multiple UAVs in a coordinated manner without the need for human intervention. This is suited to both military and civilian applications. Simulation results demonstrate the convergence and configuration of the UAVs with arbitrary initial locations and orientations. The performance has been tested for various number of UAVs and different mobility patterns of the ground target.