 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Reasoning with Collaboration and Memory
Mar 07, 2025



We envision a continuous collaborative learning system where groups of LLM agents work together to solve reasoning problems, drawing on memory they collectively build to improve performance as they gain experience. This work establishes the foundations for such a system by studying the interoperability of chain-of-thought reasoning styles, multi-agent collaboration, and memory banks. Extending beyond the identical agents of self-consistency, we introduce varied-context agents with diverse exemplars and a summarizer agent in place of voting. We generate frozen and continuously learned memory banks of exemplars and pair them with fixed, random, and similarity-based retrieval mechanisms. Our systematic study reveals where various methods contribute to reasoning performance of two LLMs on three grounded reasoning tasks, showing that random exemplar selection can often beat more principled approaches, and in some tasks, inclusion of any exemplars serves only to distract both weak and strong models.
Smartphone-based Hard-braking Event Detection at Scale for Road Safety Services
Feb 04, 2022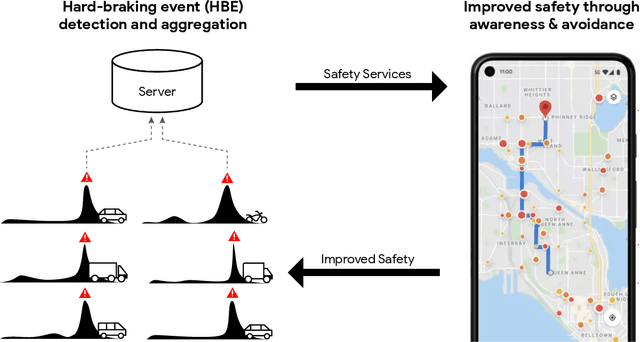
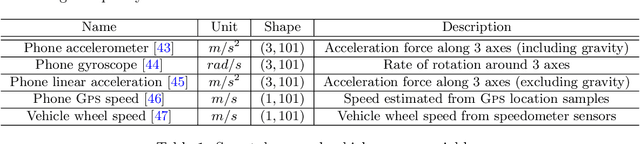
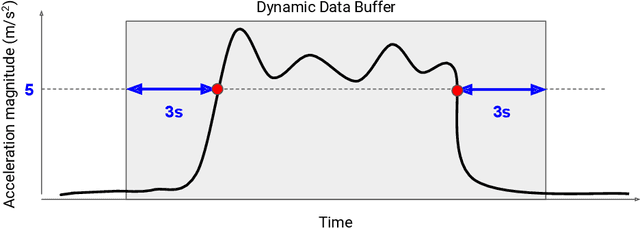

Road crashes are the sixth leading cause of lost disability-adjusted life-years (DALYs) worldwide. One major challenge in traffic safety research is the sparsity of crashes, which makes it difficult to achieve a fine-grain understanding of crash causations and predict future crash risk in a timely manner. Hard-braking events have been widely used as a safety surrogate due to their relatively high prevalence and ease of detection with embedded vehicle sensors. As an alternative to using sensors fixed in vehicles, this paper presents a scalable approach for detecting hard-braking events using the kinematics data collected from smartphone sensors. We train a Transformer-based machine learning model for hard-braking event detection using concurrent sensor readings from smartphones and vehicle sensors from drivers who connect their phone to the vehicle while navigating in Google Maps. The detection model shows superior performance with a $0.83$ Area under the Precision-Recall Curve (PR-AUC), which is $3.8\times$better than a GPS speed-based heuristic model, and $166.6\times$better than an accelerometer-based heuristic model. The detected hard-braking events are strongly correlated with crashes from publicly available datasets, supporting their use as a safety surrogate. In addition, we conduct model fairness and selection bias evaluation to ensure that the safety benefits are equally shared. The developed methodology can benefit many safety applications such as identifying safety hot spots at road network level, evaluating the safety of new user interfaces, as well as using routing to improve traffic safety.