 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePRO-TIP: Phantom for RObust automatic ultrasound calibration by TIP detection
Jun 13, 2022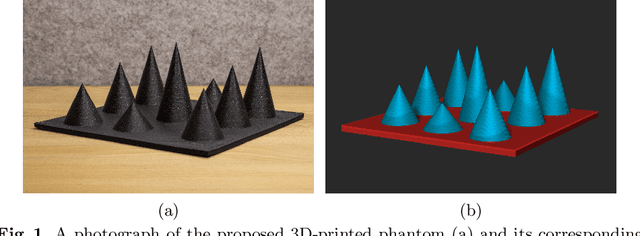
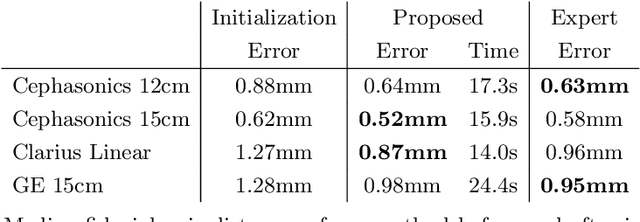
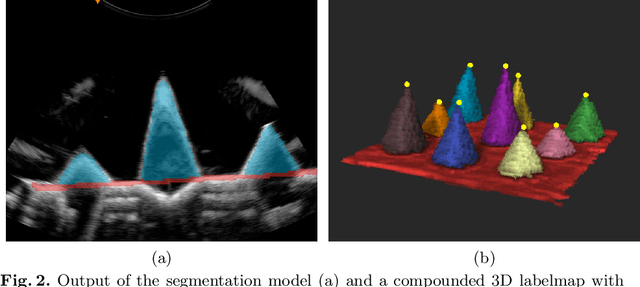
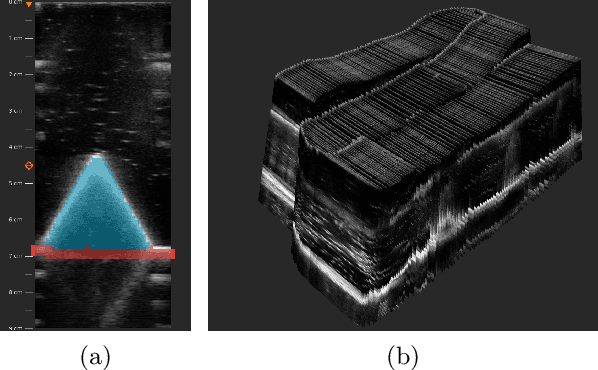
We propose a novel method to automatically calibrate tracked ultrasound probes. To this end we design a custom phantom consisting of nine cones with different heights. The tips are used as key points to be matched between multiple sweeps. We extract them using a convolutional neural network to segment the cones in every ultrasound frame and then track them across the sweep. The calibration is robustly estimated using RANSAC and later refined employing image based techniques. Our phantom can be 3D-printed and offers many advantages over state-of-the-art methods. The phantom design and algorithm code are freely available online. Since our phantom does not require a tracking target on itself, ease of use is improved over currently used techniques. The fully automatic method generalizes to new probes and different vendors, as shown in our experiments. Our approach produces results comparable to calibrations obtained by a domain expert.
Fully Automatic Segmentation of 3D Brain Ultrasound: Learning from Coarse Annotations
Apr 18, 2019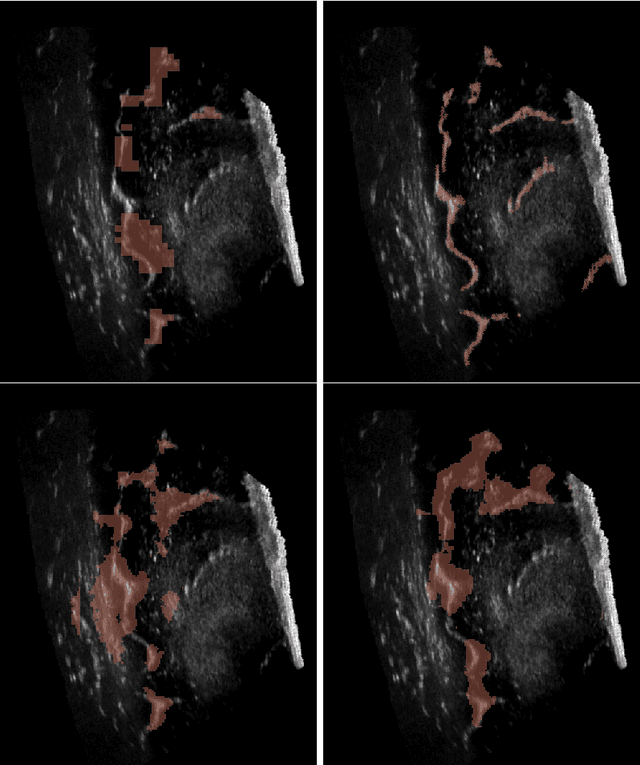
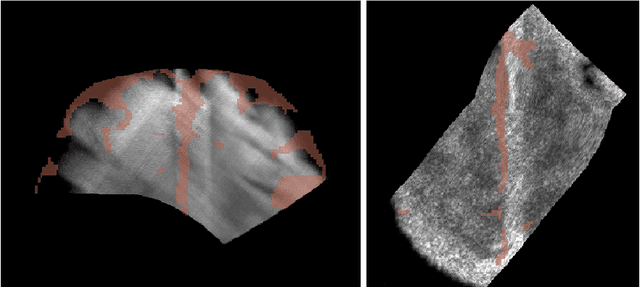
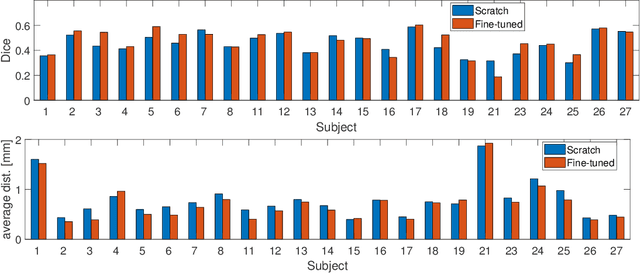
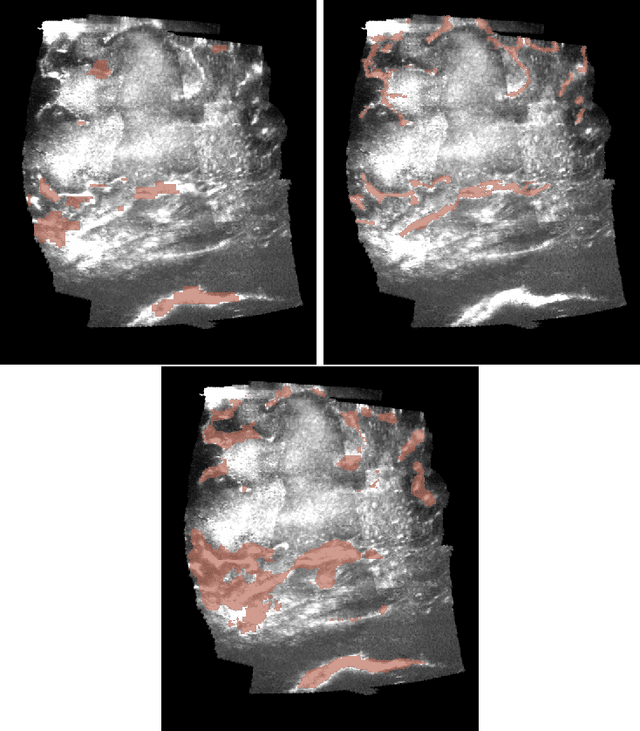
Intra-operative ultrasound is an increasingly important imaging modality in neurosurgery. However, manual interaction with imaging data during the procedures, for example to select landmarks or perform segmentation, is difficult and can be time consuming. Yet, as registration to other imaging modalities is required in most cases, some annotation is necessary. We propose a segmentation method based on DeepVNet and specifically evaluate the integration of pre-training with simulated ultrasound sweeps to improve automatic segmentation and enable a fully automatic initialization of registration. In this view, we show that despite training on coarse and incomplete semi-automatic annotations, our approach is able to capture the desired superficial structures such as \textit{sulci}, the \textit{cerebellar tentorium}, and the \textit{falx cerebri}. We perform a five-fold cross-validation on the publicly available RESECT dataset. Trained on the dataset alone, we report a Dice and Jaccard coefficient of $0.45 \pm 0.09$ and $0.30 \pm 0.07$ respectively, as well as an average distance of $0.78 \pm 0.36~mm$. With the suggested pre-training, we computed a Dice and Jaccard coefficient of $0.47 \pm 0.10$ and $0.31 \pm 0.08$, and an average distance of $0.71 \pm 0.38~mm$. The qualitative evaluation suggest that with pre-training the network can learn to generalize better and provide refined and more complete segmentations in comparison to incomplete annotations provided as input.
Weakly-Supervised White and Grey Matter Segmentation in 3D Brain Ultrasound
Apr 16, 2019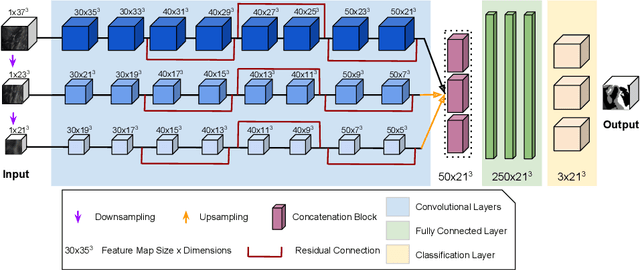
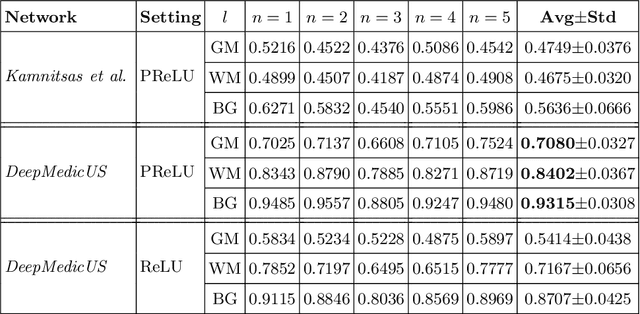

Although the segmentation of brain structures in ultrasound helps initialize image based registration, assist brain shift compensation, and provides interventional decision support, the task of segmenting grey and white matter in cranial ultrasound is very challenging and has not been addressed yet. We train a multi-scale fully convolutional neural network simultaneously for two classes in order to segment real clinical 3D ultrasound data. Parallel pathways working at different levels of resolution account for high frequency speckle noise and global 3D image features. To ensure reproducibility, the publicly available RESECT dataset is utilized for training and cross-validation. Due to the absence of a ground truth, we train with weakly annotated label. We implement label transfer from MRI to US, which is prone to a residual but inevitable registration error. To further improve results, we perform transfer learning using synthetic US data. The resulting method leads to excellent Dice scores of 0.7080, 0.8402 and 0.9315 for grey matter, white matter and background. Our proposed methodology sets an unparalleled standard for white and grey matter segmentation in 3D intracranial ultrasound.
Markerless Inside-Out Tracking for Interventional Applications
Jun 12, 2018

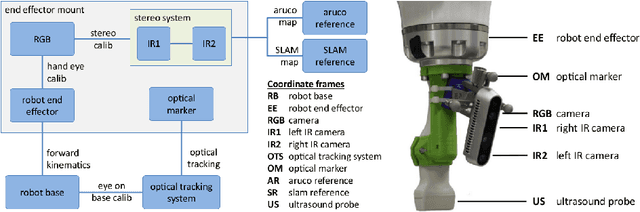
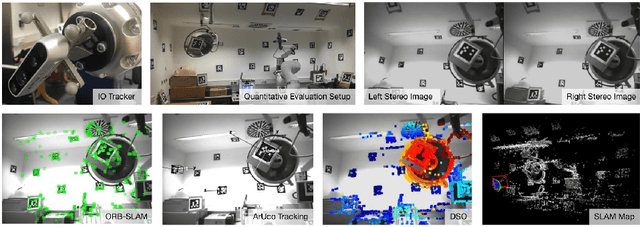
Tracking of rotation and translation of medical instruments plays a substantial role in many modern interventions. Traditional external optical tracking systems are often subject to line-of-sight issues, in particular when the region of interest is difficult to access or the procedure allows only for limited rigid body markers. The introduction of inside-out tracking systems aims to overcome these issues. We propose a marker-less tracking system based on visual SLAM to enable tracking of instruments in an interventional scenario. To achieve this goal, we mount a miniature multi-modal (monocular, stereo, active depth) vision system on the object of interest and relocalize its pose within an adaptive map of the operating room. We compare state-of-the-art algorithmic pipelines and apply the idea to transrectal 3D Ultrasound (TRUS) compounding of the prostate. Obtained volumes are compared to reconstruction using a commercial optical tracking system as well as a robotic manipulator. Feature-based binocular SLAM is identified as the most promising method and is tested extensively in challenging clinical environment under severe occlusion and for the use case of prostate US biopsies.
Initialize globally before acting locally: Enabling Landmark-free 3D US to MRI Registration
Jun 12, 2018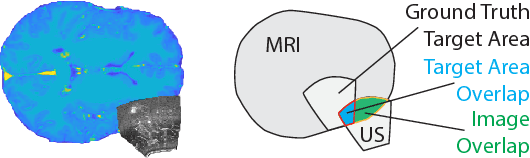
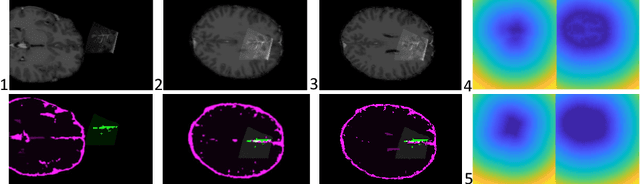
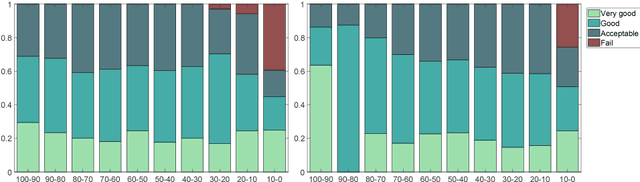
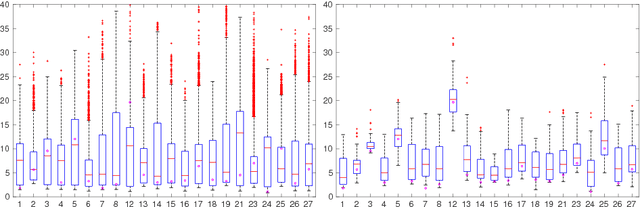
Registration of partial-view 3D US volumes with MRI data is influenced by initialization. The standard of practice is using extrinsic or intrinsic landmarks, which can be very tedious to obtain. To overcome the limitations of registration initialization, we present a novel approach that is based on Euclidean distance maps derived from easily obtainable coarse segmentations. We evaluate our approach quantitatively on the publicly available RESECT dataset and show that it is robust regarding overlap of target area and initial position. Furthermore, our method provides initializations that are suitable for state-of-the-art nonlinear, deformable image registration algorithm's capture ranges.