 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMarkerless Inside-Out Tracking for Interventional Applications
Jun 12, 2018

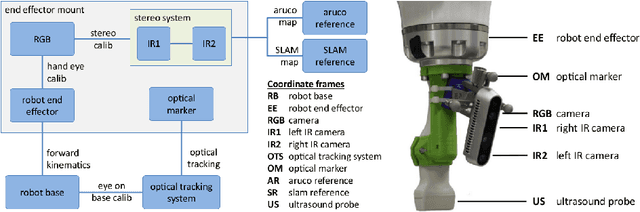
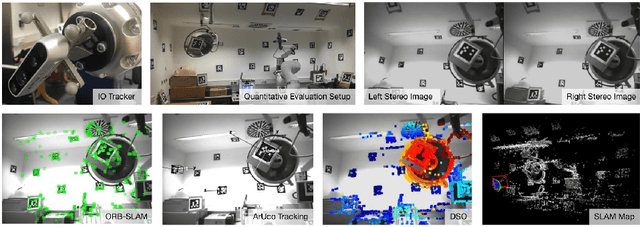
Tracking of rotation and translation of medical instruments plays a substantial role in many modern interventions. Traditional external optical tracking systems are often subject to line-of-sight issues, in particular when the region of interest is difficult to access or the procedure allows only for limited rigid body markers. The introduction of inside-out tracking systems aims to overcome these issues. We propose a marker-less tracking system based on visual SLAM to enable tracking of instruments in an interventional scenario. To achieve this goal, we mount a miniature multi-modal (monocular, stereo, active depth) vision system on the object of interest and relocalize its pose within an adaptive map of the operating room. We compare state-of-the-art algorithmic pipelines and apply the idea to transrectal 3D Ultrasound (TRUS) compounding of the prostate. Obtained volumes are compared to reconstruction using a commercial optical tracking system as well as a robotic manipulator. Feature-based binocular SLAM is identified as the most promising method and is tested extensively in challenging clinical environment under severe occlusion and for the use case of prostate US biopsies.