 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnergy-Efficient Mobile Robot Control via Run-time Monitoring of Environmental Complexity and Computing Workload
Sep 08, 2021
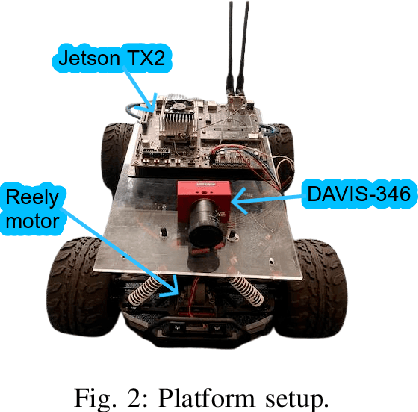
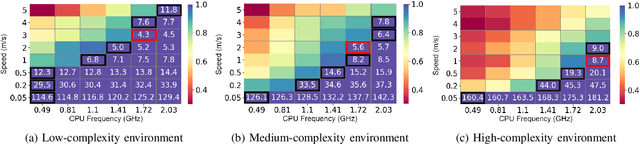
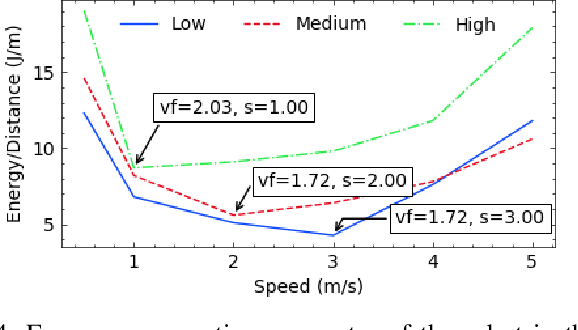
We propose an energy-efficient controller to minimize the energy consumption of a mobile robot by dynamically manipulating the mechanical and computational actuators of the robot. The mobile robot performs real-time vision-based applications based on an event-based camera. The actuators of the controller are CPU voltage/frequency for the computation part and motor voltage for the mechanical part. We show that independently considering speed control of the robot and voltage/frequency control of the CPU does not necessarily result in an energy-efficient solution. In fact, to obtain the highest efficiency, the computation and mechanical parts should be controlled together in synergy. We propose a fast hill-climbing optimization algorithm to allow the controller to find the best CPU/motor configuration at run-time and whenever the mobile robot is facing a new environment during its travel. Experimental results on a robot with Brushless DC Motors, Jetson TX2 board as the computing unit, and a DAVIS-346 event-based camera show that the proposed control algorithm can save battery energy by an average of 50.5%, 41%, and 30%, in low-complexity, medium-complexity, and high-complexity environments, over baselines.
Cellular Formation Maintenance and Collision Avoidance Using Centroid-Based Point Set Registration in a Swarm of Drones
Mar 03, 2021
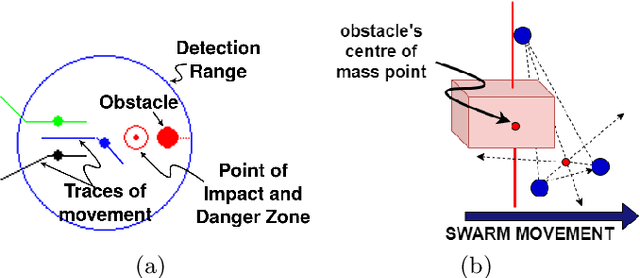
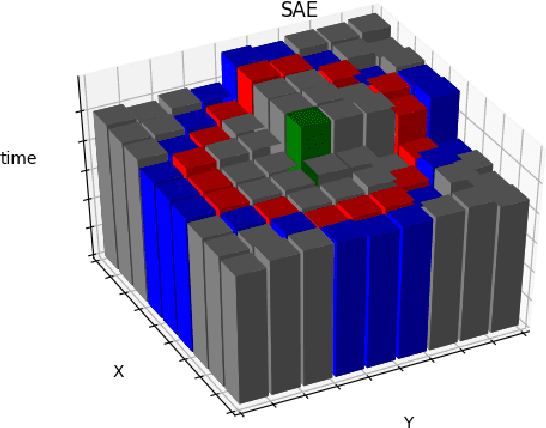
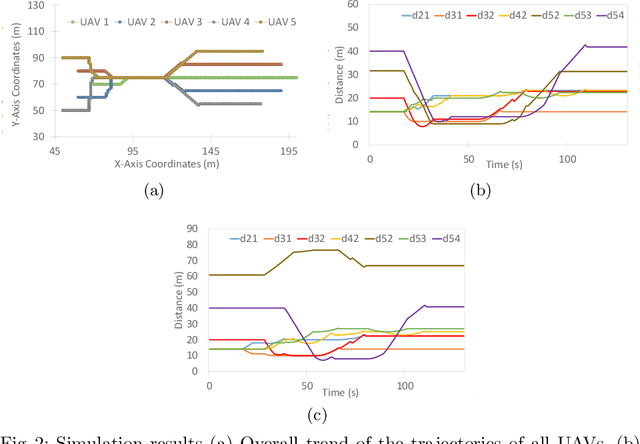
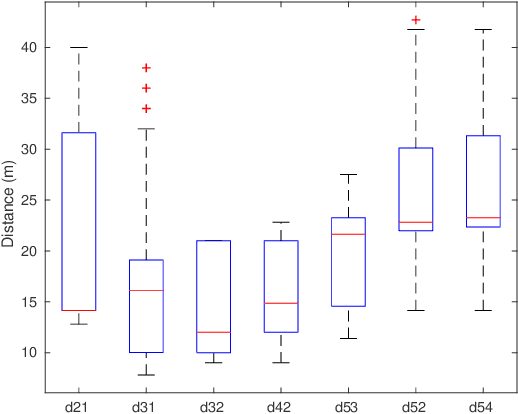
This work focuses on low-energy collision avoidance and formation maintenance in autonomous swarms of drones. Here, the two main problems are: 1) how to avoid collisions by temporarily breaking the formation, i.e., collision avoidance reformation, and 2) how do such reformation while minimizing the deviation resulting in minimization of the overall time and energy consumption of the drones. To address the first question, we use cellular automata based technique to find an efficient formation that avoids the obstacle while minimizing the time and energy. Concerning the second question, a near-optimal reformation of the swarm after successful collision avoidance is achieved by applying a temperature function reduction technique, originally used in the point set registration process. The goal of the reformation process is to remove the disturbance while minimizing the overall time it takes for the swarm to reach the destination and consequently reducing the energy consumption required by this operation. To measure the degree of formation disturbance due to collision avoidance, deviation of the centroid of the swarm formation is used, inspired by the concept of the center of mass in classical mechanics. Experimental results show the efficiency of the proposed technique, in terms of performance and energy.
Swarm Formation Morphing for Congestion Aware Collision Avoidance
Nov 08, 2020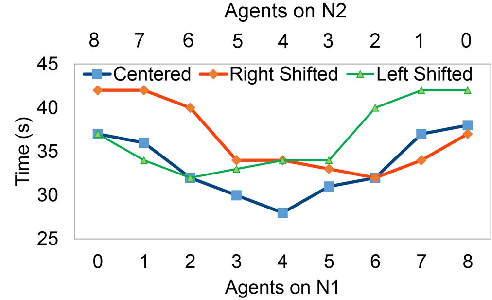
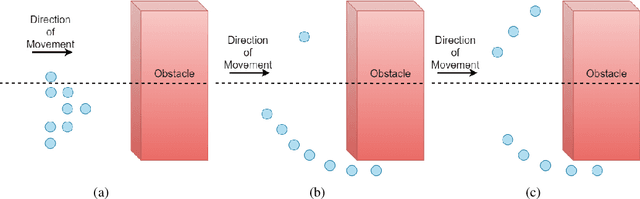
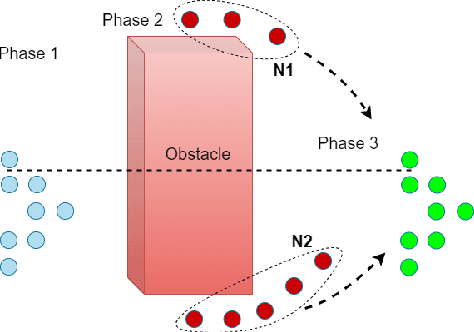
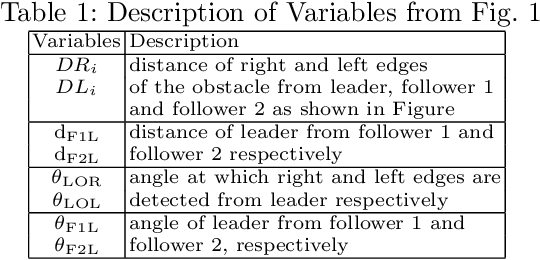
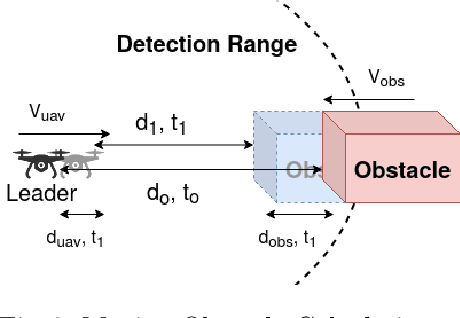
The focus of this work is to present a novel methodology for optimal distribution of a swarm formation on either side of an obstacle, when evading the obstacle, to avoid overpopulation on the sides to reduce the agents' waiting delays, resulting in a reduced overall mission time and lower energy consumption. To handle this, the problem is divided into two main parts: 1) the disturbance phase: how to morph the formation optimally to avoid the obstacle in the least possible time in the situation at hand, and 2) the convergence phase: how to optimally resume the intended formation shape once the threat of potential collision has been eliminated. For the first problem, we develop a methodology which tests different formation morphing combinations and finds the optimal one, by utilizing trajectory, velocity, and coordinate information, to bypass the obstacle. For the second problem, we utilize a thin-plate splines (TPS) inspired temperature function minimization method to bring the agents back from the distorted formation into the desired formation in an optimal manner, after collision avoidance has been successfully performed. Experimental results show that, in the considered test scenario, the traditional method based on the shortest path results in 14.7% higher energy consumption as compared to our proposed approach.
Asynchronous Corner Tracking Algorithm based on Lifetime of Events for DAVIS Cameras
Oct 29, 2020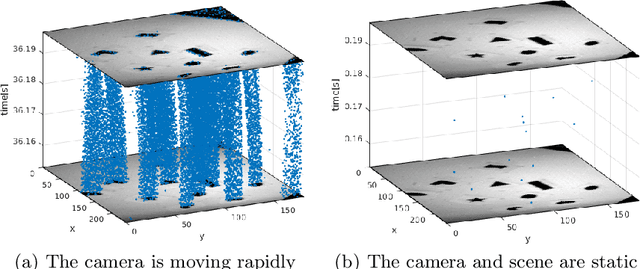
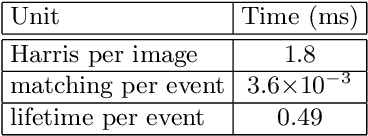
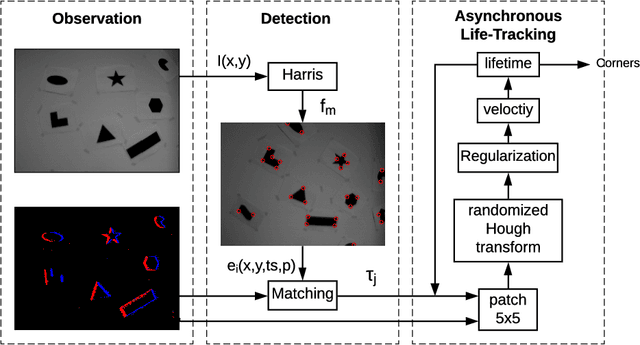

Event cameras, i.e., the Dynamic and Active-pixel Vision Sensor (DAVIS) ones, capture the intensity changes in the scene and generates a stream of events in an asynchronous fashion. The output rate of such cameras can reach up to 10 million events per second in high dynamic environments. DAVIS cameras use novel vision sensors that mimic human eyes. Their attractive attributes, such as high output rate, High Dynamic Range (HDR), and high pixel bandwidth, make them an ideal solution for applications that require high-frequency tracking. Moreover, applications that operate in challenging lighting scenarios can exploit the high HDR of event cameras, i.e., 140 dB compared to 60 dB of traditional cameras. In this paper, a novel asynchronous corner tracking method is proposed that uses both events and intensity images captured by a DAVIS camera. The Harris algorithm is used to extract features, i.e., frame-corners from keyframes, i.e., intensity images. Afterward, a matching algorithm is used to extract event-corners from the stream of events. Events are solely used to perform asynchronous tracking until the next keyframe is captured. Neighboring events, within a window size of 5x5 pixels around the event-corner, are used to calculate the velocity and direction of extracted event-corners by fitting the 2D planar using a randomized Hough transform algorithm. Experimental evaluation showed that our approach is able to update the location of the extracted corners up to 100 times during the blind time of traditional cameras, i.e., between two consecutive intensity images.
Night vision obstacle detection and avoidance based on Bio-Inspired Vision Sensors
Oct 29, 2020
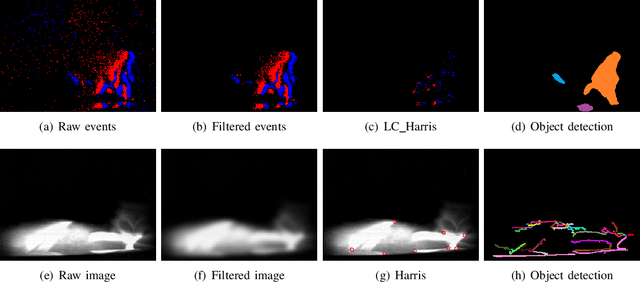
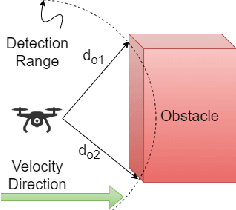
Moving towards autonomy, unmanned vehicles rely heavily on state-of-the-art collision avoidance systems (CAS). However, the detection of obstacles especially during night-time is still a challenging task since the lighting conditions are not sufficient for traditional cameras to function properly. Therefore, we exploit the powerful attributes of event-based cameras to perform obstacle detection in low lighting conditions. Event cameras trigger events asynchronously at high output temporal rate with high dynamic range of up to 120 $dB$. The algorithm filters background activity noise and extracts objects using robust Hough transform technique. The depth of each detected object is computed by triangulating 2D features extracted utilising LC-Harris. Finally, asynchronous adaptive collision avoidance (AACA) algorithm is applied for effective avoidance. Qualitative evaluation is compared using event-camera and traditional camera.
Dynamic Resource-aware Corner Detection for Bio-inspired Vision Sensors
Oct 29, 2020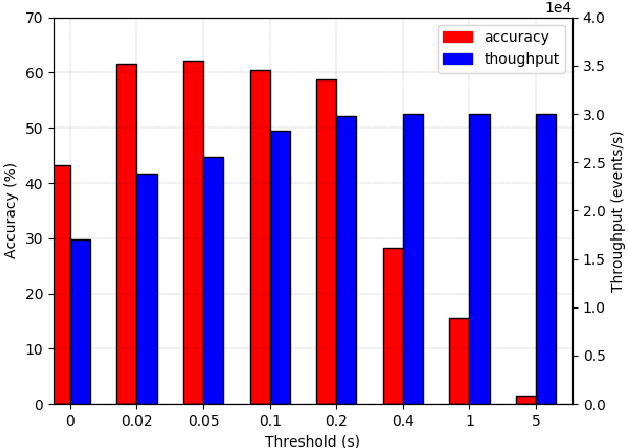


Event-based cameras are vision devices that transmit only brightness changes with low latency and ultra-low power consumption. Such characteristics make event-based cameras attractive in the field of localization and object tracking in resource-constrained systems. Since the number of generated events in such cameras is huge, the selection and filtering of the incoming events are beneficial from both increasing the accuracy of the features and reducing the computational load. In this paper, we present an algorithm to detect asynchronous corners from a stream of events in real-time on embedded systems. The algorithm is called the Three Layer Filtering-Harris or TLF-Harris algorithm. The algorithm is based on an events' filtering strategy whose purpose is 1) to increase the accuracy by deliberately eliminating some incoming events, i.e., noise, and 2) to improve the real-time performance of the system, i.e., preserving a constant throughput in terms of input events per second, by discarding unnecessary events with a limited accuracy loss. An approximation of the Harris algorithm, in turn, is used to exploit its high-quality detection capability with a low-complexity implementation to enable seamless real-time performance on embedded computing platforms. The proposed algorithm is capable of selecting the best corner candidate among neighbors and achieves an average execution time savings of 59 % compared with the conventional Harris score. Moreover, our approach outperforms the competing methods, such as eFAST, eHarris, and FA-Harris, in terms of real-time performance, and surpasses Arc* in terms of accuracy.
Dynamic Formation Reshaping Based on Point Set Registration in a Swarm of Drones
Oct 29, 2020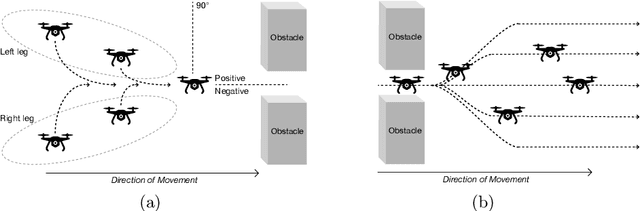
This work focuses on the formation reshaping in an optimized manner in autonomous swarm of drones. Here, the two main problems are: 1) how to break and reshape the initial formation in an optimal manner, and 2) how to do such reformation while minimizing the overall deviation of the drones and the overall time, i.e., without slowing down. To address the first problem, we introduce a set of routines for the drones/agents to follow while reshaping to a secondary formation shape. And the second problem is resolved by utilizing the temperature function reduction technique, originally used in the point set registration process. The goal is to be able to dynamically reform the shape of multi-agent based swarm in near-optimal manner while going through narrow openings between, for instance obstacles, and then bringing the agents back to their original shape after passing through the narrow passage using point set registration technique.