 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAsynchronous Corner Tracking Algorithm based on Lifetime of Events for DAVIS Cameras
Paper and Code
Oct 29, 2020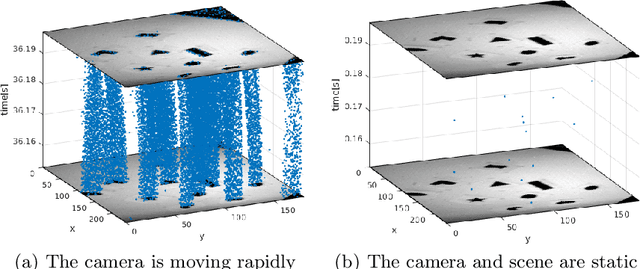
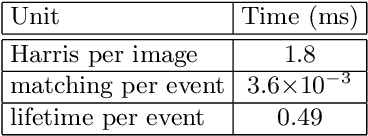
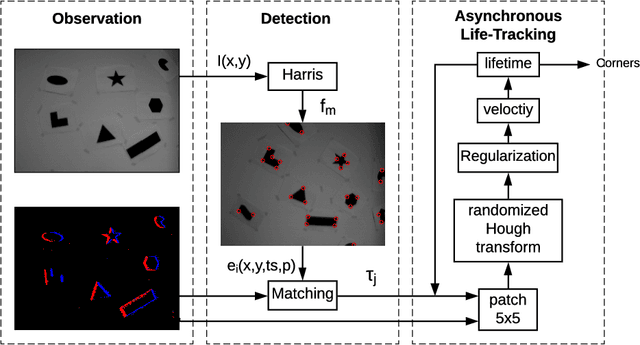

Event cameras, i.e., the Dynamic and Active-pixel Vision Sensor (DAVIS) ones, capture the intensity changes in the scene and generates a stream of events in an asynchronous fashion. The output rate of such cameras can reach up to 10 million events per second in high dynamic environments. DAVIS cameras use novel vision sensors that mimic human eyes. Their attractive attributes, such as high output rate, High Dynamic Range (HDR), and high pixel bandwidth, make them an ideal solution for applications that require high-frequency tracking. Moreover, applications that operate in challenging lighting scenarios can exploit the high HDR of event cameras, i.e., 140 dB compared to 60 dB of traditional cameras. In this paper, a novel asynchronous corner tracking method is proposed that uses both events and intensity images captured by a DAVIS camera. The Harris algorithm is used to extract features, i.e., frame-corners from keyframes, i.e., intensity images. Afterward, a matching algorithm is used to extract event-corners from the stream of events. Events are solely used to perform asynchronous tracking until the next keyframe is captured. Neighboring events, within a window size of 5x5 pixels around the event-corner, are used to calculate the velocity and direction of extracted event-corners by fitting the 2D planar using a randomized Hough transform algorithm. Experimental evaluation showed that our approach is able to update the location of the extracted corners up to 100 times during the blind time of traditional cameras, i.e., between two consecutive intensity images.