 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLoD-Loc v3: Generalized Aerial Localization in Dense Cities using Instance Silhouette Alignment
Mar 20, 2026We present LoD-Loc v3, a novel method for generalized aerial visual localization in dense urban environments. While prior work LoD-Loc v2 achieves localization through semantic building silhouette alignment with low-detail city models, it suffers from two key limitations: poor cross-scene generalization and frequent failure in dense building scenes. Our method addresses these challenges through two key innovations. First, we develop a new synthetic data generation pipeline that produces InsLoD-Loc - the largest instance segmentation dataset for aerial imagery to date, comprising 100k images with precise instance building annotations. This enables trained models to exhibit remarkable zero-shot generalization capability. Second, we reformulate the localization paradigm by shifting from semantic to instance silhouette alignment, which significantly reduces pose estimation ambiguity in dense scenes. Extensive experiments demonstrate that LoD-Loc v3 outperforms existing state-of-the-art (SOTA) baselines, achieving superior performance in both cross-scene and dense urban scenarios with a large margin. The project is available at https://nudt-sawlab.github.io/LoD-Locv3/.
Generalizable Multispectral Land Cover Classification via Frequency-Aware Mixture of Low-Rank Token Experts
May 20, 2025



We introduce Land-MoE, a novel approach for multispectral land cover classification (MLCC). Spectral shift, which emerges from disparities in sensors and geospatial conditions, poses a significant challenge in this domain. Existing methods predominantly rely on domain adaptation and generalization strategies, often utilizing small-scale models that exhibit limited performance. In contrast, Land-MoE addresses these issues by hierarchically inserting a Frequency-aware Mixture of Low-rank Token Experts, to fine-tune Vision Foundation Models (VFMs) in a parameter-efficient manner. Specifically, Land-MoE comprises two key modules: the mixture of low-rank token experts (MoLTE) and frequency-aware filters (FAF). MoLTE leverages rank-differentiated tokens to generate diverse feature adjustments for individual instances within multispectral images. By dynamically combining learnable low-rank token experts of varying ranks, it enhances the robustness against spectral shifts. Meanwhile, FAF conducts frequency-domain modulation on the refined features. This process enables the model to effectively capture frequency band information that is strongly correlated with semantic essence, while simultaneously suppressing frequency noise irrelevant to the task. Comprehensive experiments on MLCC tasks involving cross-sensor and cross-geospatial setups demonstrate that Land-MoE outperforms existing methods by a large margin. Additionally, the proposed approach has also achieved state-of-the-art performance in domain generalization semantic segmentation tasks of RGB remote sensing images.
LoD-Loc: Aerial Visual Localization using LoD 3D Map with Neural Wireframe Alignment
Oct 16, 2024



We propose a new method named LoD-Loc for visual localization in the air. Unlike existing localization algorithms, LoD-Loc does not rely on complex 3D representations and can estimate the pose of an Unmanned Aerial Vehicle (UAV) using a Level-of-Detail (LoD) 3D map. LoD-Loc mainly achieves this goal by aligning the wireframe derived from the LoD projected model with that predicted by the neural network. Specifically, given a coarse pose provided by the UAV sensor, LoD-Loc hierarchically builds a cost volume for uniformly sampled pose hypotheses to describe pose probability distribution and select a pose with maximum probability. Each cost within this volume measures the degree of line alignment between projected and predicted wireframes. LoD-Loc also devises a 6-DoF pose optimization algorithm to refine the previous result with a differentiable Gaussian-Newton method. As no public dataset exists for the studied problem, we collect two datasets with map levels of LoD3.0 and LoD2.0, along with real RGB queries and ground-truth pose annotations. We benchmark our method and demonstrate that LoD-Loc achieves excellent performance, even surpassing current state-of-the-art methods that use textured 3D models for localization. The code and dataset are available at https://victorzoo.github.io/LoD-Loc.github.io/.
UAVD4L: A Large-Scale Dataset for UAV 6-DoF Localization
Jan 11, 2024Despite significant progress in global localization of Unmanned Aerial Vehicles (UAVs) in GPS-denied environments, existing methods remain constrained by the availability of datasets. Current datasets often focus on small-scale scenes and lack viewpoint variability, accurate ground truth (GT) pose, and UAV build-in sensor data. To address these limitations, we introduce a large-scale 6-DoF UAV dataset for localization (UAVD4L) and develop a two-stage 6-DoF localization pipeline (UAVLoc), which consists of offline synthetic data generation and online visual localization. Additionally, based on the 6-DoF estimator, we design a hierarchical system for tracking ground target in 3D space. Experimental results on the new dataset demonstrate the effectiveness of the proposed approach. Code and dataset are available at https://github.com/RingoWRW/UAVD4L
Render-and-Compare: Cross-View 6 DoF Localization from Noisy Prior
Feb 13, 2023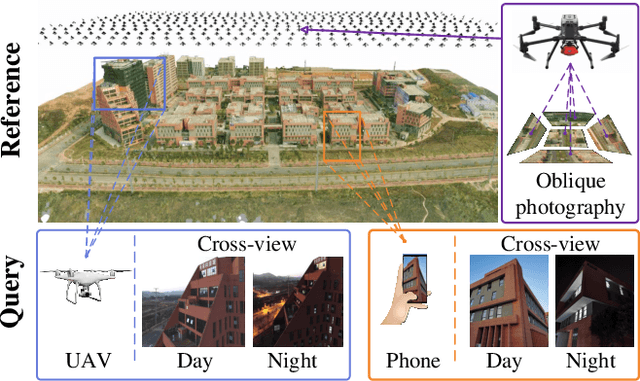



Despite the significant progress in 6-DoF visual localization, researchers are mostly driven by ground-level benchmarks. Compared with aerial oblique photography, ground-level map collection lacks scalability and complete coverage. In this work, we propose to go beyond the traditional ground-level setting and exploit the cross-view localization from aerial to ground. We solve this problem by formulating camera pose estimation as an iterative render-and-compare pipeline and enhancing the robustness through augmenting seeds from noisy initial priors. As no public dataset exists for the studied problem, we collect a new dataset that provides a variety of cross-view images from smartphones and drones and develop a semi-automatic system to acquire ground-truth poses for query images. We benchmark our method as well as several state-of-the-art baselines and demonstrate that our method outperforms other approaches by a large margin.