 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGlia: A Human-Inspired AI for Automated Systems Design and Optimization
Oct 31, 2025Can an AI autonomously design mechanisms for computer systems on par with the creativity and reasoning of human experts? We present Glia, an AI architecture for networked systems design that uses large language models (LLMs) in a human-inspired, multi-agent workflow. Each agent specializes in reasoning, experimentation, and analysis, collaborating through an evaluation framework that grounds abstract reasoning in empirical feedback. Unlike prior ML-for-systems methods that optimize black-box policies, Glia generates interpretable designs and exposes its reasoning process. When applied to a distributed GPU cluster for LLM inference, it produces new algorithms for request routing, scheduling, and auto-scaling that perform at human-expert levels in significantly less time, while yielding novel insights into workload behavior. Our results suggest that by combining reasoning LLMs with structured experimentation, an AI can produce creative and understandable designs for complex systems problems.
Savaal: Scalable Concept-Driven Question Generation to Enhance Human Learning
Feb 18, 2025
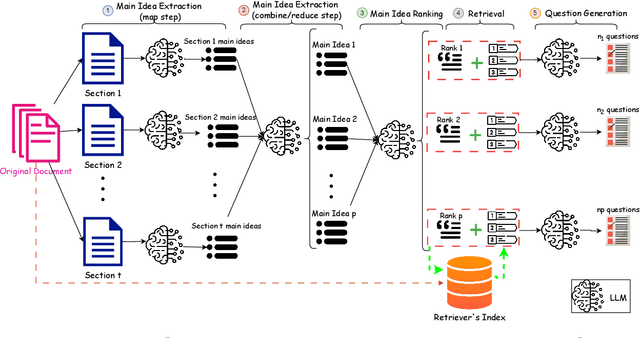


Assessing and enhancing human learning through question-answering is vital, yet automating this process remains challenging. While large language models (LLMs) excel at summarization and query responses, their ability to generate meaningful questions for learners is underexplored. We propose Savaal, a scalable question-generation system with three objectives: (i) scalability, enabling question generation from hundreds of pages of text (ii) depth of understanding, producing questions beyond factual recall to test conceptual reasoning, and (iii) domain-independence, automatically generating questions across diverse knowledge areas. Instead of providing an LLM with large documents as context, Savaal improves results with a three-stage processing pipeline. Our evaluation with 76 human experts on 71 papers and PhD dissertations shows that Savaal generates questions that better test depth of understanding by 6.5X for dissertations and 1.5X for papers compared to a direct-prompting LLM baseline. Notably, as document length increases, Savaal's advantages in higher question quality and lower cost become more pronounced.
DriveTrack: A Benchmark for Long-Range Point Tracking in Real-World Videos
Dec 15, 2023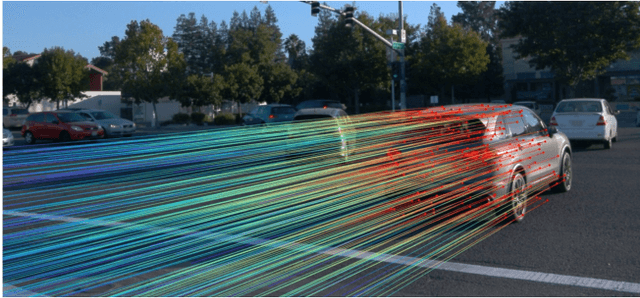
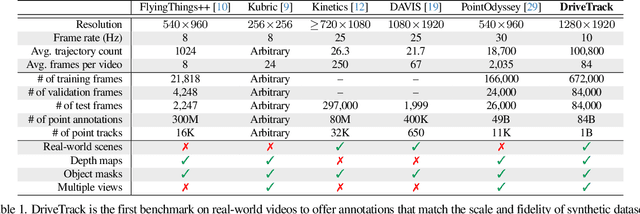

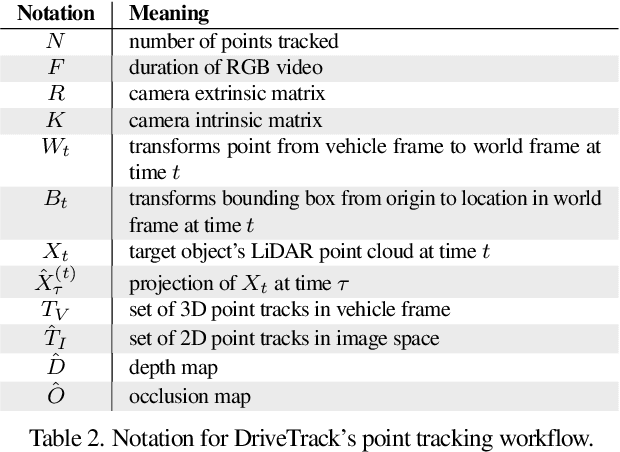
This paper presents DriveTrack, a new benchmark and data generation framework for long-range keypoint tracking in real-world videos. DriveTrack is motivated by the observation that the accuracy of state-of-the-art trackers depends strongly on visual attributes around the selected keypoints, such as texture and lighting. The problem is that these artifacts are especially pronounced in real-world videos, but these trackers are unable to train on such scenes due to a dearth of annotations. DriveTrack bridges this gap by building a framework to automatically annotate point tracks on autonomous driving datasets. We release a dataset consisting of 1 billion point tracks across 24 hours of video, which is seven orders of magnitude greater than prior real-world benchmarks and on par with the scale of synthetic benchmarks. DriveTrack unlocks new use cases for point tracking in real-world videos. First, we show that fine-tuning keypoint trackers on DriveTrack improves accuracy on real-world scenes by up to 7%. Second, we analyze the sensitivity of trackers to visual artifacts in real scenes and motivate the idea of running assistive keypoint selectors alongside trackers.