 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlow-Based Synthesis of Reactive Tests for Discrete Decision-Making Systems with Temporal Logic Specifications
Apr 15, 2024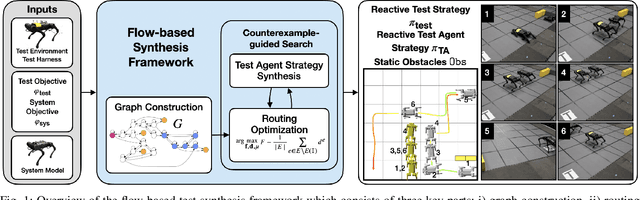
Designing tests to evaluate if a given autonomous system satisfies complex specifications is challenging due to the complexity of these systems. This work proposes a flow-based approach for reactive test synthesis from temporal logic specifications, enabling the synthesis of test environments consisting of static and reactive obstacles and dynamic test agents. The temporal logic specifications describe desired test behavior, including system requirements as well as a test objective that is not revealed to the system. The synthesized test strategy places restrictions on system actions in reaction to the system state. The tests are minimally restrictive and accomplish the test objective while ensuring realizability of the system's objective without aiding it (semi-cooperative setting). Automata theory and flow networks are leveraged to formulate a mixed-integer linear program (MILP) to synthesize the test strategy. For a dynamic test agent, the agent strategy is synthesized for a GR(1) specification constructed from the solution of the MILP. If the specification is unrealizable by the dynamics of the test agent, a counterexample-guided approach is used to resolve the MILP until a strategy is found. This flow-based, reactive test synthesis is conducted offline and is agnostic to the system controller. Finally, the resulting test strategy is demonstrated in simulation and experimentally on a pair of quadrupedal robots for a variety of specifications.
Synthesizing Reactive Test Environments for Autonomous Systems: Testing Reach-Avoid Specifications with Multi-Commodity Flows
Oct 19, 2022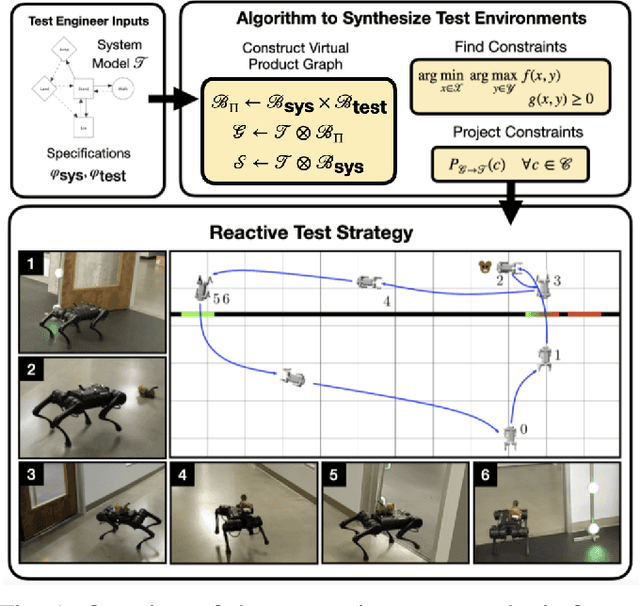
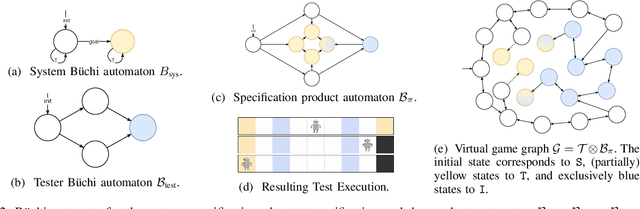
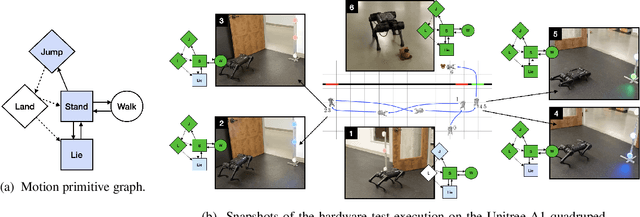
We study automated test generation for verifying discrete decision-making modules in autonomous systems. We utilize linear temporal logic to encode the requirements on the system under test in the system specification and the behavior that we want to observe during the test is given as the test specification which is unknown to the system. First, we use the specifications and their corresponding non-deterministic B\"uchi automata to generate the specification product automaton. Second, a virtual product graph representing the high-level interaction between the system and the test environment is constructed modeling the product automaton encoding the system, the test environment, and specifications. The main result of this paper is an optimization problem, framed as a multi-commodity network flow problem, that solves for constraints on the virtual product graph which can then be projected to the test environment. Therefore, the result of the optimization problem is reactive test synthesis that ensures that the system meets the test specifications along with satisfying the system specifications. This framework is illustrated in simulation on grid world examples, and demonstrated on hardware with the Unitree A1 quadruped, wherein dynamic locomotion behaviors are verified in the context of reactive test environments.