 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDirect and Sparse Deformable Tracking
Sep 15, 2021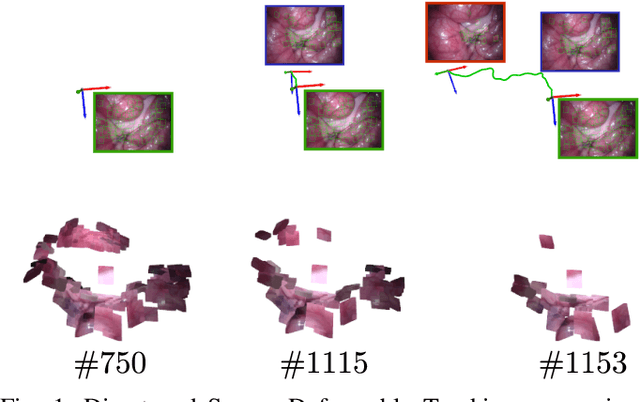
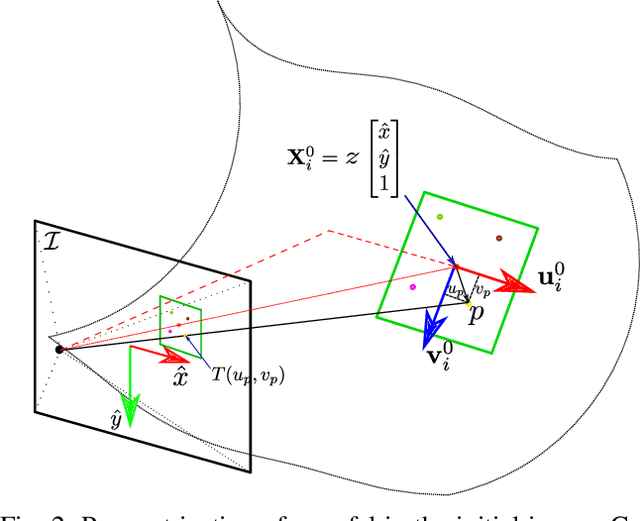
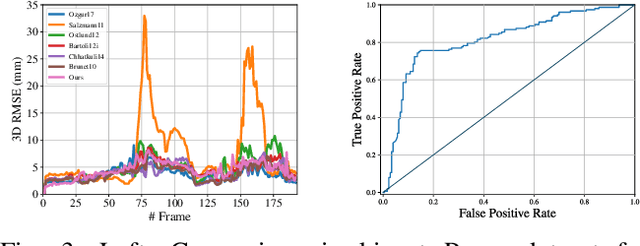
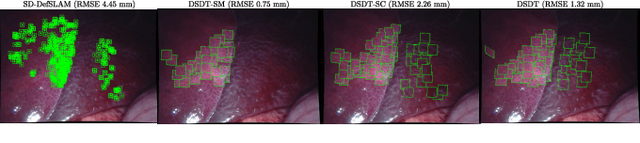
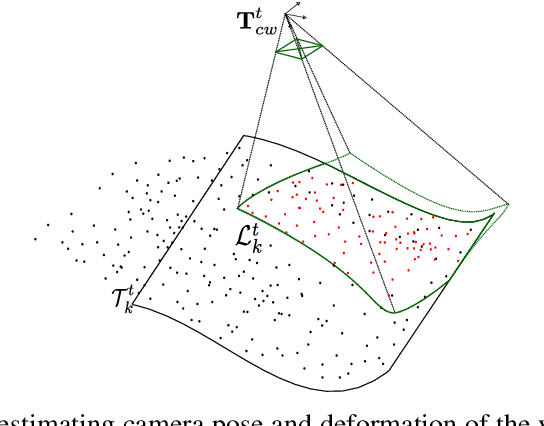
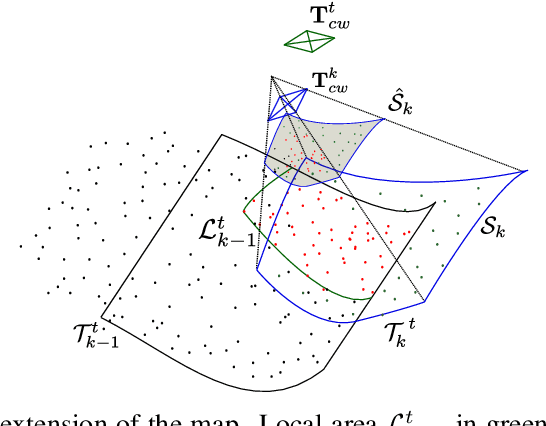
Deformable Monocular SLAM algorithms recover the localization of a camera in an unknown deformable environment. Current approaches use a template-based deformable tracking to recover the camera pose and the deformation of the map. These template-based methods use an underlying global deformation model. In this paper, we introduce a novel deformable camera tracking method with a local deformation model for each point. Each map point is defined as a single textured surfel that moves independently of the other map points. Thanks to a direct photometric error cost function, we can track the position and orientation of the surfel without an explicit global deformation model. In our experiments, we validate the proposed system and observe that our local deformation model estimates more accurately and robustly the targeted deformations of the map in both laboratory-controlled experiments and in-body scenarios undergoing non-isometric deformations, with changing topology or discontinuities.
DefSLAM: Tracking and Mapping of Deforming Scenes from Monocular Sequences
Aug 20, 2019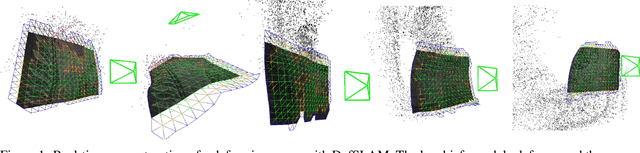
We present the first monocular SLAM capable of operating in deforming scenes in real-time. Our DefSLAM approach fuses isometric Shape-from-Template (SfT) and Non-Rigid Structure-from-Motion (NRSfM) techniques to deal with the exploratory sequences typical of SLAM. A deformation tracking thread recovers the pose of the camera and the deformation of the observed map at frame rate by means of SfT. A deformation mapping thread runs in parallel to update the template at keyframe rate by means of NRSfM with a batch of covisible keyframes. In our experiments, DefSLAM processes sequences of deforming scenes both in a laboratory controlled experiment and in medical endoscopy sequences, being able to produce accurate 3D models of the scene with respect to the moving camera.