 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDefSLAM: Tracking and Mapping of Deforming Scenes from Monocular Sequences
Paper and Code
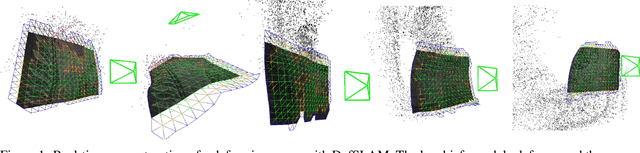
We present the first monocular SLAM capable of operating in deforming scenes in real-time. Our DefSLAM approach fuses isometric Shape-from-Template (SfT) and Non-Rigid Structure-from-Motion (NRSfM) techniques to deal with the exploratory sequences typical of SLAM. A deformation tracking thread recovers the pose of the camera and the deformation of the observed map at frame rate by means of SfT. A deformation mapping thread runs in parallel to update the template at keyframe rate by means of NRSfM with a batch of covisible keyframes. In our experiments, DefSLAM processes sequences of deforming scenes both in a laboratory controlled experiment and in medical endoscopy sequences, being able to produce accurate 3D models of the scene with respect to the moving camera.