 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDetection of Pedestrian Turning Motions to Enhance Indoor Map Matching Performance
Sep 04, 2023A pedestrian navigation system (PNS) in indoor environments, where global navigation satellite system (GNSS) signal access is difficult, is necessary, particularly for search and rescue (SAR) operations in large buildings. This paper focuses on studying pedestrian walking behaviors to enhance the performance of indoor pedestrian dead reckoning (PDR) and map matching techniques. Specifically, our research aims to detect pedestrian turning motions using smartphone inertial measurement unit (IMU) information in a given PDR trajectory. To improve existing methods, including the threshold-based turn detection method, hidden Markov model (HMM)-based turn detection method, and pruned exact linear time (PELT) algorithm-based turn detection method, we propose enhanced algorithms that better detect pedestrian turning motions. During field tests, using the threshold-based method, we observed a missed detection rate of 20.35% and a false alarm rate of 7.65%. The PELT-based method achieved a significant improvement with a missed detection rate of 8.93% and a false alarm rate of 6.97%. However, the best results were obtained using the HMM-based method, which demonstrated a missed detection rate of 5.14% and a false alarm rate of 2.00%. In summary, our research contributes to the development of a more accurate and reliable pedestrian navigation system by leveraging smartphone IMU data and advanced algorithms for turn detection in indoor environments.
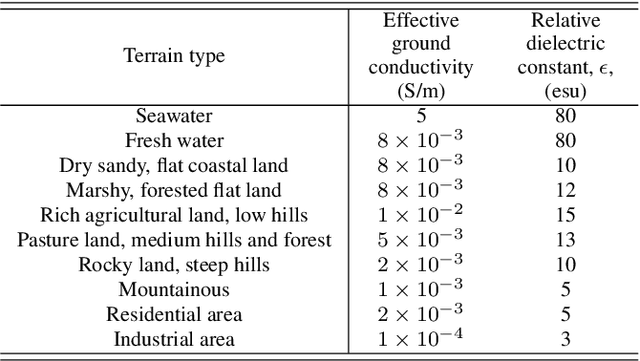
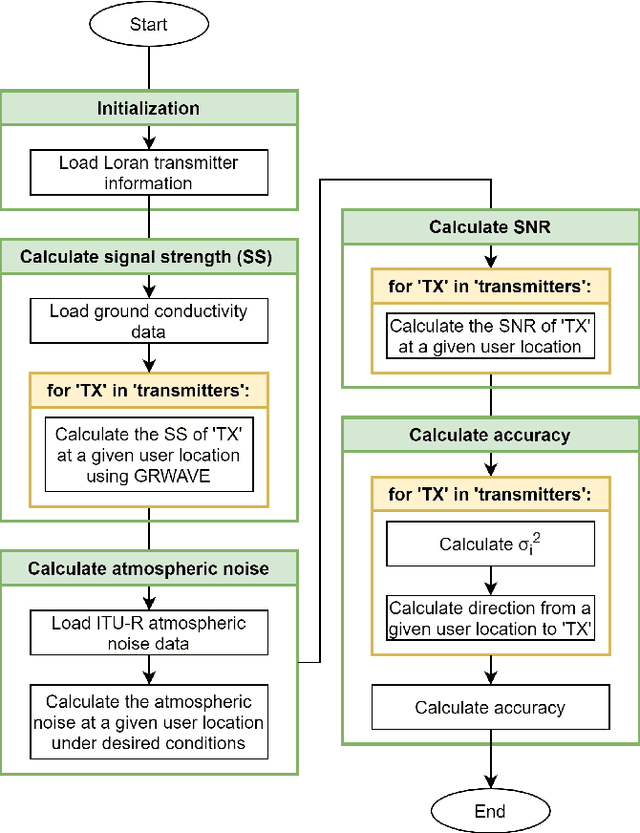
Simulation of Medium-Frequency R-Mode Signal Strength
Oct 01, 2022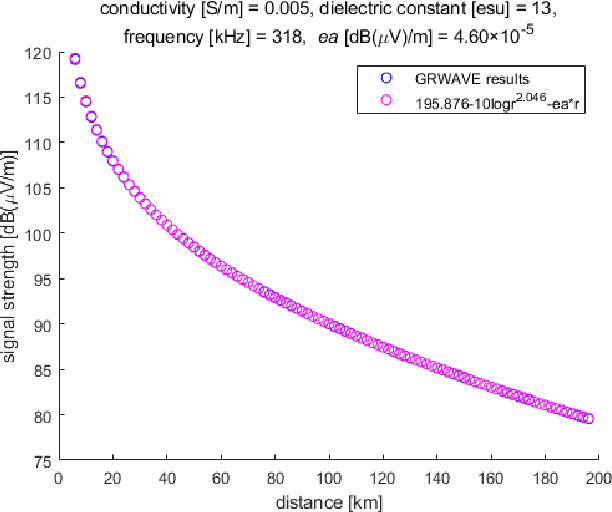

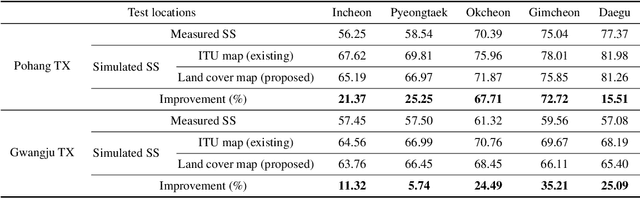
Assuming failure in the global navigation satellite systems due to radio frequency interference and ionospheric anomaly, an R-Mode system, a terrestrial integrated navigation system, is being actively studied for domestic deployment in South Korea. In this study, parameters for an approximate calculation of the received signal strength were obtained and applied to develop a performance simulation tool for a medium-frequency R-Mode system. As a case study, the signal strength from the Yeongju transmitter was simulated using the proposed parameters.
Enhanced Accuracy Simulator for a Future Korean Nationwide eLoran System
Aug 13, 2021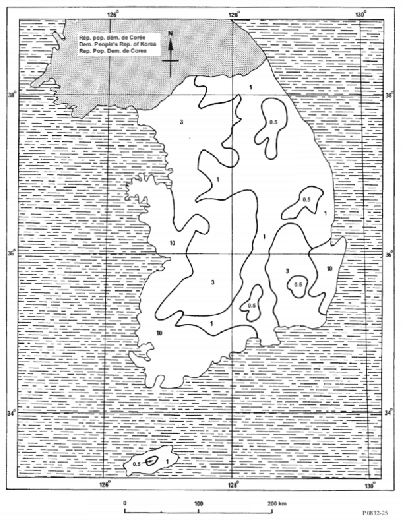
The Global Positioning System (GPS) has become the most widely used positioning, navigation, and timing system. However, the vulnerability of GPS to radio frequency interference has attracted significant attention. After experiencing several incidents of intentional high-power GPS jamming trials by North Korea, South Korea decided to deploy the enhanced long-range navigation (eLoran) system, which is a high-power terrestrial radio-navigation system that can complement GPS. As the first phase of the South Korean eLoran program, an eLoran testbed system was recently developed and declared operational on June 1, 2021. Once its operational performance is determined to be satisfactory, South Korea plans to move to the second phase of the program, which is a nationwide eLoran system. For the optimal deployment of additional eLoran transmitters in a nationwide system, it is necessary to properly simulate the expected positioning accuracy of the said future system. In this study, we propose enhanced eLoran accuracy simulation methods based on a land cover map and transmitter jitter estimation. Using actual measurements over the country, the simulation accuracy of the proposed methods was confirmed to be approximately 10%-91% better than that of the existing Loran (i.e., Loran-C and eLoran) positioning accuracy simulators depending on the test locations.