 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComparison of Spatio-Temporal Models for Human Motion and Pose Forecasting in Face-to-Face Interaction Scenarios
Mar 07, 2022


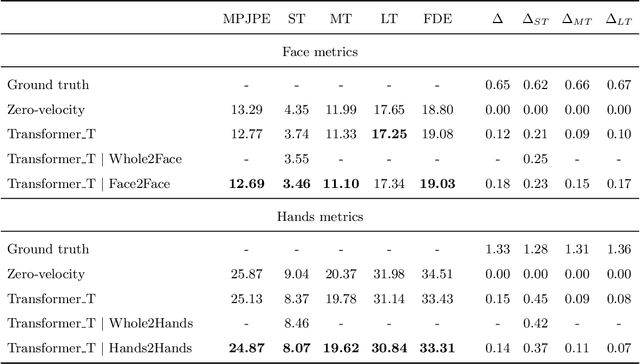
Human behavior forecasting during human-human interactions is of utmost importance to provide robotic or virtual agents with social intelligence. This problem is especially challenging for scenarios that are highly driven by interpersonal dynamics. In this work, we present the first systematic comparison of state-of-the-art approaches for behavior forecasting. To do so, we leverage whole-body annotations (face, body, and hands) from the very recently released UDIVA v0.5, which features face-to-face dyadic interactions. Our best attention-based approaches achieve state-of-the-art performance in UDIVA v0.5. We show that by autoregressively predicting the future with methods trained for the short-term future (<400ms), we outperform the baselines even for a considerably longer-term future (up to 2s). We also show that this finding holds when highly noisy annotations are used, which opens new horizons towards the use of weakly-supervised learning. Combined with large-scale datasets, this may help boost the advances in this field.
* single column, 27 pages, 7 figures, 7 tables
Didn't see that coming: a survey on non-verbal social human behavior forecasting
Mar 04, 2022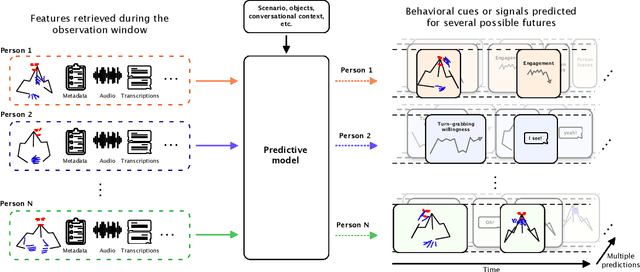



Non-verbal social human behavior forecasting has increasingly attracted the interest of the research community in recent years. Its direct applications to human-robot interaction and socially-aware human motion generation make it a very attractive field. In this survey, we define the behavior forecasting problem for multiple interactive agents in a generic way that aims at unifying the fields of social signals prediction and human motion forecasting, traditionally separated. We hold that both problem formulations refer to the same conceptual problem, and identify many shared fundamental challenges: future stochasticity, context awareness, history exploitation, etc. We also propose a taxonomy that comprises methods published in the last 5 years in a very informative way and describes the current main concerns of the community with regard to this problem. In order to promote further research on this field, we also provide a summarised and friendly overview of audiovisual datasets featuring non-acted social interactions. Finally, we describe the most common metrics used in this task and their particular issues.
* single column, 27 pages, 4 figures, 3 tables