 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnrealROX+: An Improved Tool for Acquiring Synthetic Data from Virtual 3D Environments
Apr 23, 2021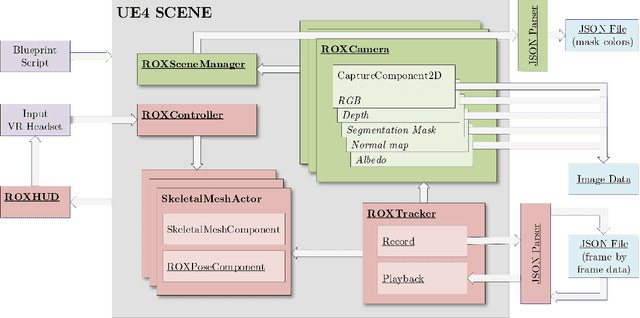

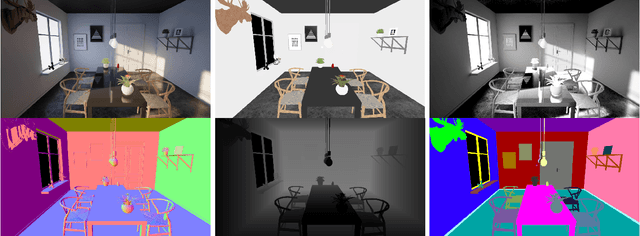
Synthetic data generation has become essential in last years for feeding data-driven algorithms, which surpassed traditional techniques performance in almost every computer vision problem. Gathering and labelling the amount of data needed for these data-hungry models in the real world may become unfeasible and error-prone, while synthetic data give us the possibility of generating huge amounts of data with pixel-perfect annotations. However, most synthetic datasets lack from enough realism in their rendered images. In that context UnrealROX generation tool was presented in 2019, allowing to generate highly realistic data, at high resolutions and framerates, with an efficient pipeline based on Unreal Engine, a cutting-edge videogame engine. UnrealROX enabled robotic vision researchers to generate realistic and visually plausible data with full ground truth for a wide variety of problems such as class and instance semantic segmentation, object detection, depth estimation, visual grasping, and navigation. Nevertheless, its workflow was very tied to generate image sequences from a robotic on-board camera, making hard to generate data for other purposes. In this work, we present UnrealROX+, an improved version of UnrealROX where its decoupled and easy-to-use data acquisition system allows to quickly design and generate data in a much more flexible and customizable way. Moreover, it is packaged as an Unreal plug-in, which makes it more comfortable to use with already existing Unreal projects, and it also includes new features such as generating albedo or a Python API for interacting with the virtual environment from Deep Learning frameworks.
A Review on Deep Learning Techniques for Video Prediction
Apr 15, 2020

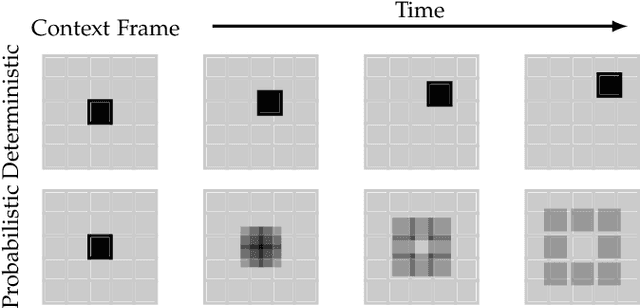
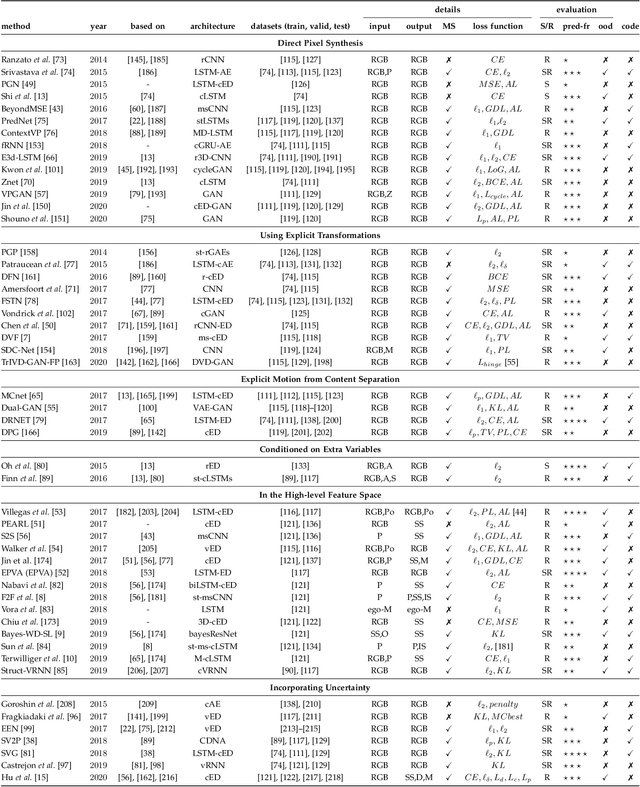
The ability to predict, anticipate and reason about future outcomes is a key component of intelligent decision-making systems. In light of the success of deep learning in computer vision, deep-learning-based video prediction emerged as a promising research direction. Defined as a self-supervised learning task, video prediction represents a suitable framework for representation learning, as it demonstrated potential capabilities for extracting meaningful representations of the underlying patterns in natural videos. Motivated by the increasing interest in this task, we provide a review on the deep learning methods for prediction in video sequences. We firstly define the video prediction fundamentals, as well as mandatory background concepts and the most used datasets. Next, we carefully analyze existing video prediction models organized according to a proposed taxonomy, highlighting their contributions and their significance in the field. The summary of the datasets and methods is accompanied with experimental results that facilitate the assessment of the state of the art on a quantitative basis. The paper is summarized by drawing some general conclusions, identifying open research challenges and by pointing out future research directions.
A Visually Plausible Grasping System for Object Manipulation and Interaction in Virtual Reality Environments
Mar 12, 2019
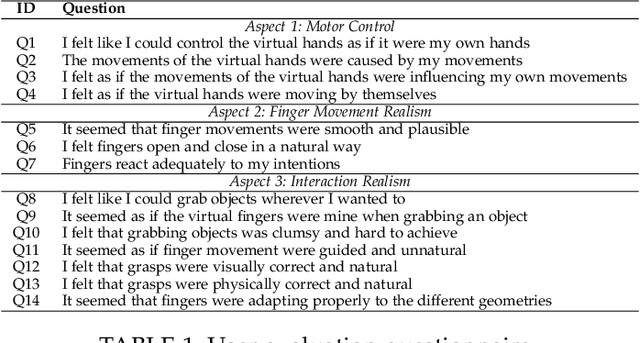


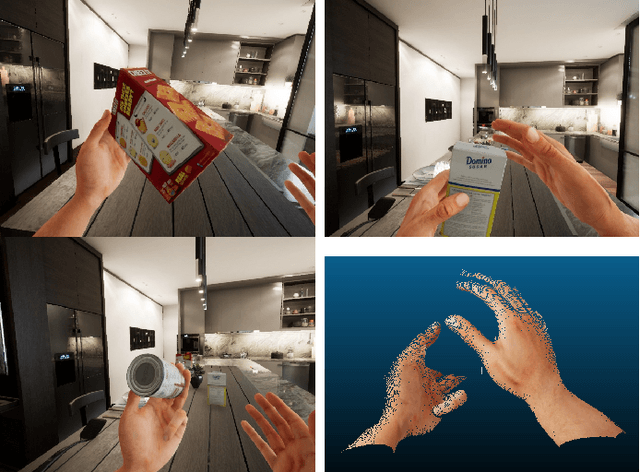
Interaction in virtual reality (VR) environments is essential to achieve a pleasant and immersive experience. Most of the currently existing VR applications, lack of robust object grasping and manipulation, which are the cornerstone of interactive systems. Therefore, we propose a realistic, flexible and robust grasping system that enables rich and real-time interactions in virtual environments. It is visually realistic because it is completely user-controlled, flexible because it can be used for different hand configurations, and robust because it allows the manipulation of objects regardless their geometry, i.e. hand is automatically fitted to the object shape. In order to validate our proposal, an exhaustive qualitative and quantitative performance analysis has been carried out. On the one hand, qualitative evaluation was used in the assessment of the abstract aspects such as: hand movement realism, interaction realism and motor control. On the other hand, for the quantitative evaluation a novel error metric has been proposed to visually analyze the performed grips. This metric is based on the computation of the distance from the finger phalanges to the nearest contact point on the object surface. These contact points can be used with different application purposes, mainly in the field of robotics. As a conclusion, system evaluation reports a similar performance between users with previous experience in virtual reality applications and inexperienced users, referring to a steep learning curve.
The RobotriX: An eXtremely Photorealistic and Very-Large-Scale Indoor Dataset of Sequences with Robot Trajectories and Interactions
Jan 19, 2019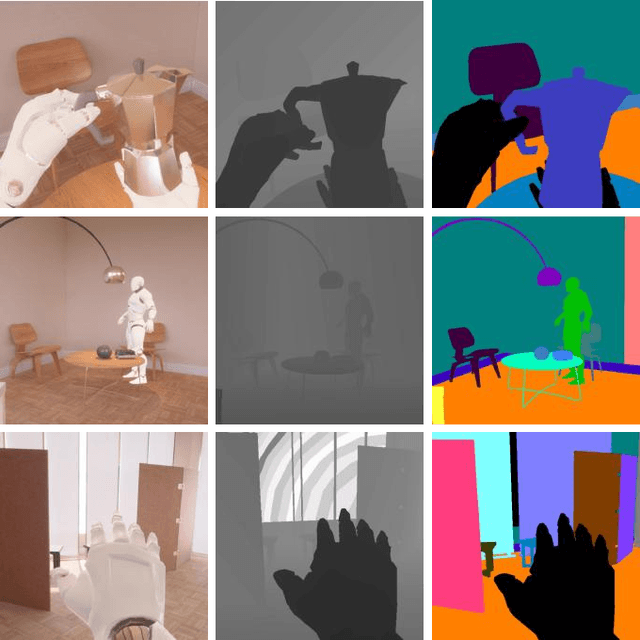



Enter the RobotriX, an extremely photorealistic indoor dataset designed to enable the application of deep learning techniques to a wide variety of robotic vision problems. The RobotriX consists of hyperrealistic indoor scenes which are explored by robot agents which also interact with objects in a visually realistic manner in that simulated world. Photorealistic scenes and robots are rendered by Unreal Engine into a virtual reality headset which captures gaze so that a human operator can move the robot and use controllers for the robotic hands; scene information is dumped on a per-frame basis so that it can be reproduced offline to generate raw data and ground truth labels. By taking this approach, we were able to generate a dataset of 38 semantic classes totaling 8M stills recorded at +60 frames per second with full HD resolution. For each frame, RGB-D and 3D information is provided with full annotations in both spaces. Thanks to the high quality and quantity of both raw information and annotations, the RobotriX will serve as a new milestone for investigating 2D and 3D robotic vision tasks with large-scale data-driven techniques.