 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDetection and Tracking of General Movable Objects in Large 3D Maps
Jan 30, 2018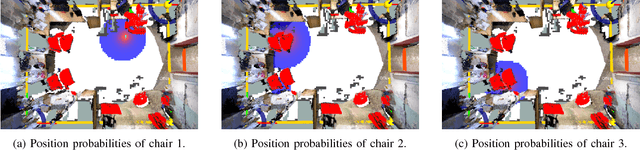



This paper studies the problem of detection and tracking of general objects with long-term dynamics, observed by a mobile robot moving in a large environment. A key problem is that due to the environment scale, it can only observe a subset of the objects at any given time. Since some time passes between observations of objects in different places, the objects might be moved when the robot is not there. We propose a model for this movement in which the objects typically only move locally, but with some small probability they jump longer distances, through what we call global motion. For filtering, we decompose the posterior over local and global movements into two linked processes. The posterior over the global movements and measurement associations is sampled, while we track the local movement analytically using Kalman filters. This novel filter is evaluated on point cloud data gathered autonomously by a mobile robot over an extended period of time. We show that tracking jumping objects is feasible, and that the proposed probabilistic treatment outperforms previous methods when applied to real world data. The key to efficient probabilistic tracking in this scenario is focused sampling of the object posteriors.
Unsupervised Object Discovery and Segmentation of RGBD-images
Oct 18, 2017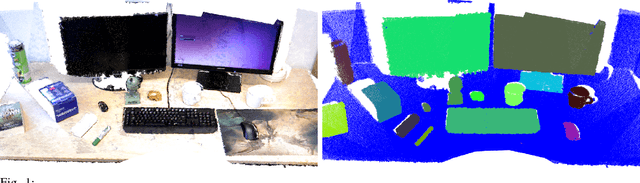

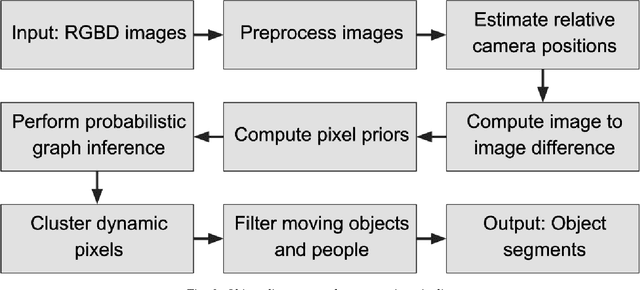

In this paper we introduce a system for unsupervised object discovery and segmentation of RGBD-images. The system models the sensor noise directly from data, allowing accurate segmentation without sensor specific hand tuning of measurement noise models making use of the recently introduced Statistical Inlier Estimation (SIE) method. Through a fully probabilistic formulation, the system is able to apply probabilistic inference, enabling reliable segmentation in previously challenging scenarios. In addition, we introduce new methods for filtering out false positives, significantly improving the signal to noise ratio. We show that the system significantly outperform state-of-the-art in on a challenging real-world dataset.
Adaptive Cost Function for Pointcloud Registration
Apr 25, 2017
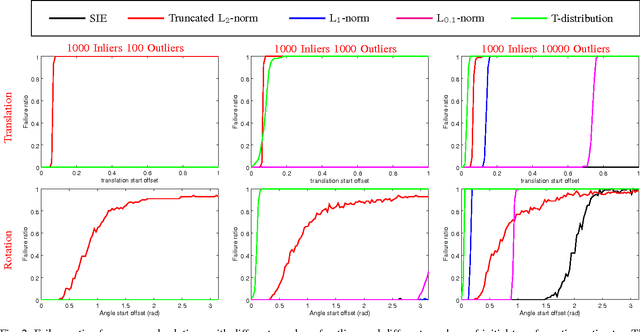
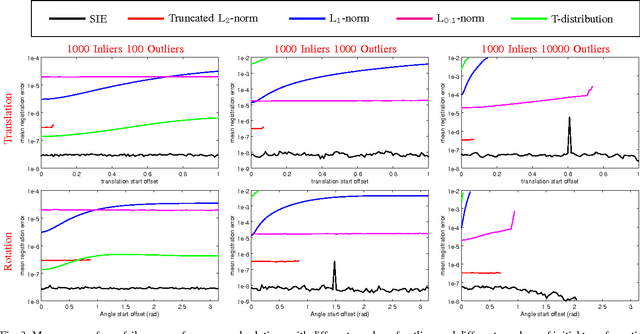

In this paper we introduce an adaptive cost function for pointcloud registration. The algorithm automatically estimates the sensor noise, which is important for generalization across different sensors and environments. Through experiments on real and synthetic data, we show significant improvements in accuracy and robustness over state-of-the-art solutions.