Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Cost Function for Pointcloud Registration
Paper and Code
Apr 25, 2017
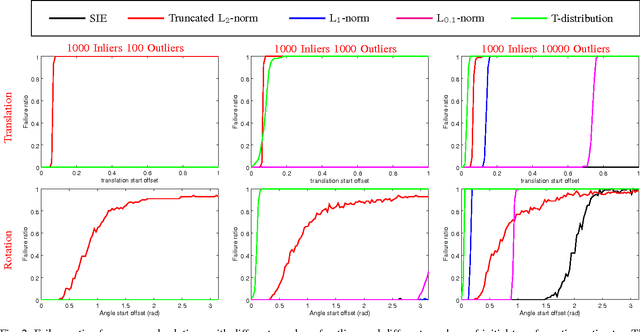
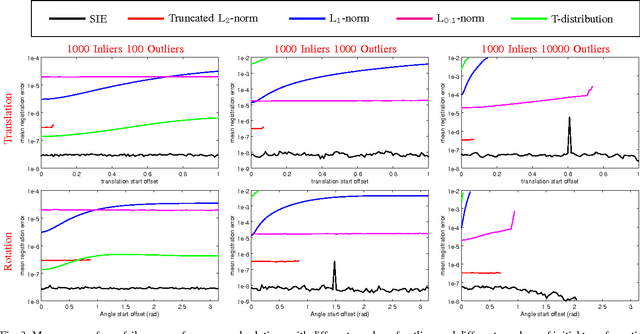

In this paper we introduce an adaptive cost function for pointcloud registration. The algorithm automatically estimates the sensor noise, which is important for generalization across different sensors and environments. Through experiments on real and synthetic data, we show significant improvements in accuracy and robustness over state-of-the-art solutions.
* 10 pages, 7 figures, 1 table
View paper on