 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Latents Benchmark '21: Evaluating latent variable models of neural population activity
Sep 10, 2021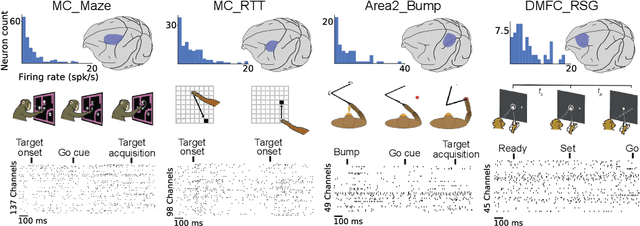
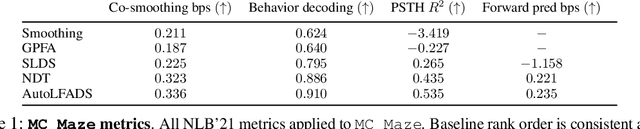
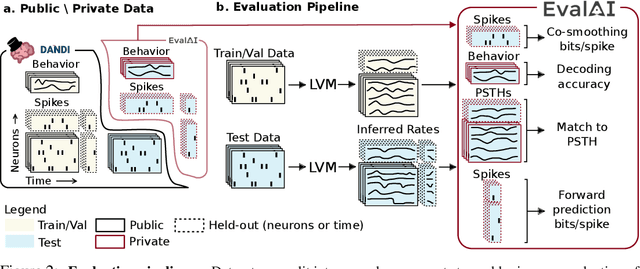

Advances in neural recording present increasing opportunities to study neural activity in unprecedented detail. Latent variable models (LVMs) are promising tools for analyzing this rich activity across diverse neural systems and behaviors, as LVMs do not depend on known relationships between the activity and external experimental variables. However, progress in latent variable modeling is currently impeded by a lack of standardization, resulting in methods being developed and compared in an ad hoc manner. To coordinate these modeling efforts, we introduce a benchmark suite for latent variable modeling of neural population activity. We curate four datasets of neural spiking activity from cognitive, sensory, and motor areas to promote models that apply to the wide variety of activity seen across these areas. We identify unsupervised evaluation as a common framework for evaluating models across datasets, and apply several baselines that demonstrate benchmark diversity. We release this benchmark through EvalAI. http://neurallatents.github.io
Representation learning for neural population activity with Neural Data Transformers
Aug 02, 2021Neural population activity is theorized to reflect an underlying dynamical structure. This structure can be accurately captured using state space models with explicit dynamics, such as those based on recurrent neural networks (RNNs). However, using recurrence to explicitly model dynamics necessitates sequential processing of data, slowing real-time applications such as brain-computer interfaces. Here we introduce the Neural Data Transformer (NDT), a non-recurrent alternative. We test the NDT's ability to capture autonomous dynamical systems by applying it to synthetic datasets with known dynamics and data from monkey motor cortex during a reaching task well-modeled by RNNs. The NDT models these datasets as well as state-of-the-art recurrent models. Further, its non-recurrence enables 3.9ms inference, well within the loop time of real-time applications and more than 6 times faster than recurrent baselines on the monkey reaching dataset. These results suggest that an explicit dynamics model is not necessary to model autonomous neural population dynamics. Code: https://github.com/snel-repo/neural-data-transformers
Auxiliary Tasks and Exploration Enable ObjectNav
Apr 08, 2021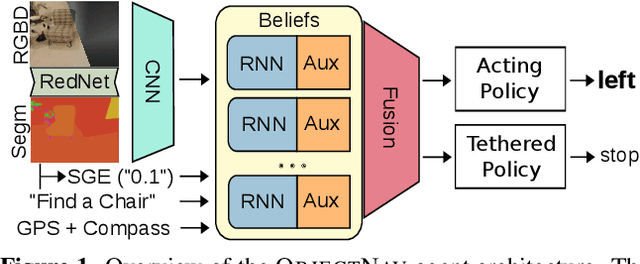

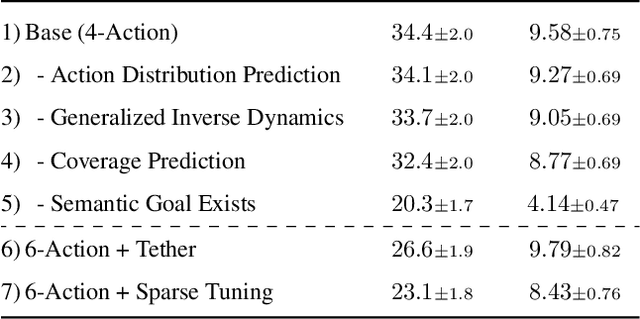

ObjectGoal Navigation (ObjectNav) is an embodied task wherein agents are to navigate to an object instance in an unseen environment. Prior works have shown that end-to-end ObjectNav agents that use vanilla visual and recurrent modules, e.g. a CNN+RNN, perform poorly due to overfitting and sample inefficiency. This has motivated current state-of-the-art methods to mix analytic and learned components and operate on explicit spatial maps of the environment. We instead re-enable a generic learned agent by adding auxiliary learning tasks and an exploration reward. Our agents achieve 24.5% success and 8.1% SPL, a 37% and 8% relative improvement over prior state-of-the-art, respectively, on the Habitat ObjectNav Challenge. From our analysis, we propose that agents will act to simplify their visual inputs so as to smooth their RNN dynamics, and that auxiliary tasks reduce overfitting by minimizing effective RNN dimensionality; i.e. a performant ObjectNav agent that must maintain coherent plans over long horizons does so by learning smooth, low-dimensional recurrent dynamics. Site: https://joel99.github.io/objectnav/
Auxiliary Tasks Speed Up Learning PointGoal Navigation
Jul 09, 2020


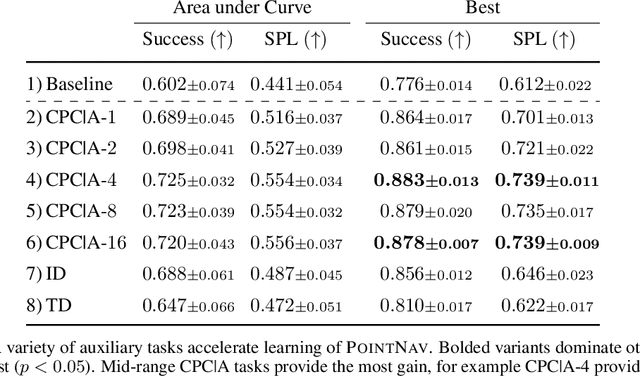
PointGoal Navigation is an embodied task that requires agents to navigate to a specified point in an unseen environment. Wijmans et al. showed that this task is solvable but their method is computationally prohibitive, requiring 2.5 billion frames and 180 GPU-days. In this work, we develop a method to significantly increase sample and time efficiency in learning PointNav using self-supervised auxiliary tasks (e.g. predicting the action taken between two egocentric observations, predicting the distance between two observations from a trajectory,etc.).We find that naively combining multiple auxiliary tasks improves sample efficiency,but only provides marginal gains beyond a point. To overcome this, we use attention to combine representations learnt from individual auxiliary tasks. Our best agent is 5x faster to reach the performance of the previous state-of-the-art, DD-PPO, at 40M frames, and improves on DD-PPO's performance at40M frames by 0.16 SPL. Our code is publicly available at https://github.com/joel99/habitat-pointnav-aux.