 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRefinement of Monocular Depth Maps via Multi-View Differentiable Rendering
Oct 04, 2024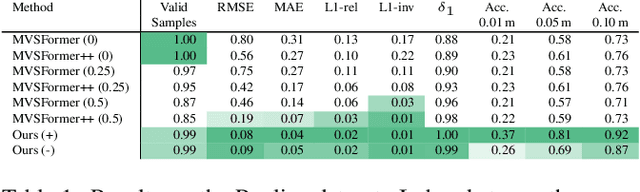
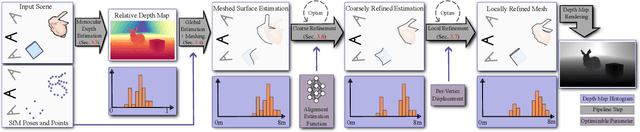
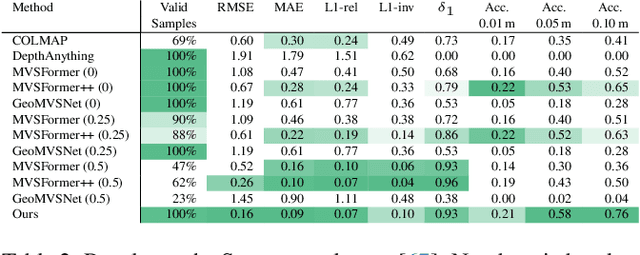

The accurate reconstruction of per-pixel depth for an image is vital for many tasks in computer graphics, computer vision, and robotics. In this paper, we present a novel approach to generate view consistent and detailed depth maps from a number of posed images. We leverage advances in monocular depth estimation, which generate topologically complete, but metrically inaccurate depth maps and refine them in a two-stage optimization process based on a differentiable renderer. Taking the monocular depth map as input, we first scale this map to absolute distances based on structure-from-motion and transform the depths to a triangle surface mesh. We then refine this depth mesh in a local optimization, enforcing photometric and geometric consistency. Our evaluation shows that our method is able to generate dense, detailed, high-quality depth maps, also in challenging indoor scenarios, and outperforms state-of-the-art depth reconstruction approaches. Overview and supplemental material of this project can be found at https://lorafib.github.io/ref_depth/.
LiveNVS: Neural View Synthesis on Live RGB-D Streams
Nov 29, 2023



Existing real-time RGB-D reconstruction approaches, like Kinect Fusion, lack real-time photo-realistic visualization. This is due to noisy, oversmoothed or incomplete geometry and blurry textures which are fused from imperfect depth maps and camera poses. Recent neural rendering methods can overcome many of such artifacts but are mostly optimized for offline usage, hindering the integration into a live reconstruction pipeline. In this paper, we present LiveNVS, a system that allows for neural novel view synthesis on a live RGB-D input stream with very low latency and real-time rendering. Based on the RGB-D input stream, novel views are rendered by projecting neural features into the target view via a densely fused depth map and aggregating the features in image-space to a target feature map. A generalizable neural network then translates the target feature map into a high-quality RGB image. LiveNVS achieves state-of-the-art neural rendering quality of unknown scenes during capturing, allowing users to virtually explore the scene and assess reconstruction quality in real-time.