 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRefinement of Monocular Depth Maps via Multi-View Differentiable Rendering
Paper and Code
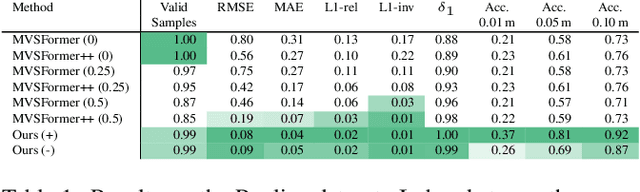
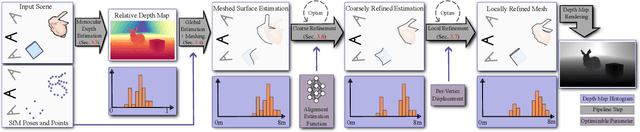
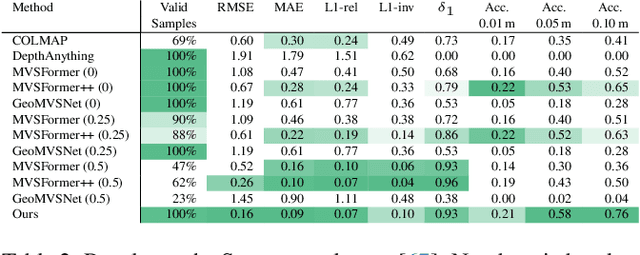

The accurate reconstruction of per-pixel depth for an image is vital for many tasks in computer graphics, computer vision, and robotics. In this paper, we present a novel approach to generate view consistent and detailed depth maps from a number of posed images. We leverage advances in monocular depth estimation, which generate topologically complete, but metrically inaccurate depth maps and refine them in a two-stage optimization process based on a differentiable renderer. Taking the monocular depth map as input, we first scale this map to absolute distances based on structure-from-motion and transform the depths to a triangle surface mesh. We then refine this depth mesh in a local optimization, enforcing photometric and geometric consistency. Our evaluation shows that our method is able to generate dense, detailed, high-quality depth maps, also in challenging indoor scenarios, and outperforms state-of-the-art depth reconstruction approaches. Overview and supplemental material of this project can be found at https://lorafib.github.io/ref_depth/.