 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResearch on emotionally intelligent dialogue generation based on automatic dialogue system
Apr 17, 2024Automated dialogue systems are important applications of artificial intelligence, and traditional systems struggle to understand user emotions and provide empathetic feedback. This study integrates emotional intelligence technology into automated dialogue systems and creates a dialogue generation model with emotional intelligence through deep learning and natural language processing techniques. The model can detect and understand a wide range of emotions and specific pain signals in real time, enabling the system to provide empathetic interaction. By integrating the results of the study "Can artificial intelligence detect pain and express pain empathy?", the model's ability to understand the subtle elements of pain empathy has been enhanced, setting higher standards for emotional intelligence dialogue systems. The project aims to provide theoretical understanding and practical suggestions to integrate advanced emotional intelligence capabilities into dialogue systems, thereby improving user experience and interaction quality.
Particle Filter SLAM for Vehicle Localization
Feb 20, 2024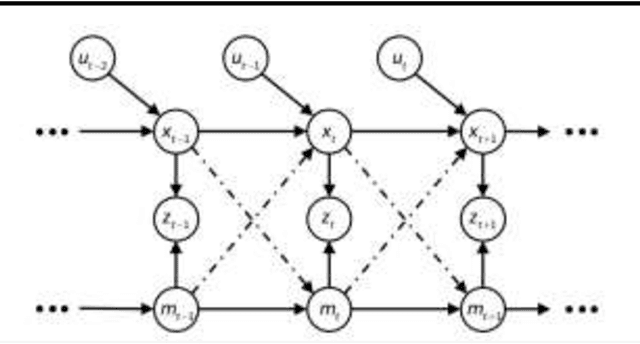
Simultaneous Localization and Mapping (SLAM) presents a formidable challenge in robotics, involving the dynamic construction of a map while concurrently determining the precise location of the robotic agent within an unfamiliar environment. This intricate task is further compounded by the inherent "chicken-and-egg" dilemma, where accurate mapping relies on a dependable estimation of the robot's location, and vice versa. Moreover, the computational intensity of SLAM adds an additional layer of complexity, making it a crucial yet demanding topic in the field. In our research, we address the challenges of SLAM by adopting the Particle Filter SLAM method. Our approach leverages encoded data and fiber optic gyro (FOG) information to enable precise estimation of vehicle motion, while lidar technology contributes to environmental perception by providing detailed insights into surrounding obstacles. The integration of these data streams culminates in the establishment of a Particle Filter SLAM framework, representing a key endeavor in this paper to effectively navigate and overcome the complexities associated with simultaneous localization and mapping in robotic systems.
* 6 pages, Journal of Industrial Engineering and Applied Science