 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLLMTrack: Semantic Multi-Object Tracking with Multi-modal Large Language Models
Jan 10, 2026Traditional Multi-Object Tracking (MOT) systems have achieved remarkable precision in localization and association, effectively answering \textit{where} and \textit{who}. However, they often function as autistic observers, capable of tracing geometric paths but blind to the semantic \textit{what} and \textit{why} behind object behaviors. To bridge the gap between geometric perception and cognitive reasoning, we propose \textbf{LLMTrack}, a novel end-to-end framework for Semantic Multi-Object Tracking (SMOT). We adopt a bionic design philosophy that decouples strong localization from deep understanding, utilizing Grounding DINO as the eyes and the LLaVA-OneVision multimodal large model as the brain. We introduce a Spatio-Temporal Fusion Module that aggregates instance-level interaction features and video-level contexts, enabling the Large Language Model (LLM) to comprehend complex trajectories. Furthermore, we design a progressive three-stage training strategy, Visual Alignment, Temporal Fine-tuning, and Semantic Injection via LoRA to efficiently adapt the massive model to the tracking domain. Extensive experiments on the BenSMOT benchmark demonstrate that LLMTrack achieves state-of-the-art performance, significantly outperforming existing methods in instance description, interaction recognition, and video summarization while maintaining robust tracking stability.
StereoMV2D: A Sparse Temporal Stereo-Enhanced Framework for Robust Multi-View 3D Object Detection
Dec 19, 2025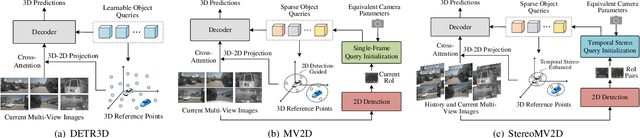
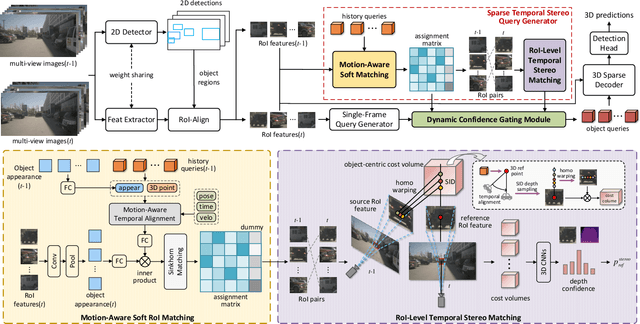
Multi-view 3D object detection is a fundamental task in autonomous driving perception, where achieving a balance between detection accuracy and computational efficiency remains crucial. Sparse query-based 3D detectors efficiently aggregate object-relevant features from multi-view images through a set of learnable queries, offering a concise and end-to-end detection paradigm. Building on this foundation, MV2D leverages 2D detection results to provide high-quality object priors for query initialization, enabling higher precision and recall. However, the inherent depth ambiguity in single-frame 2D detections still limits the accuracy of 3D query generation. To address this issue, we propose StereoMV2D, a unified framework that integrates temporal stereo modeling into the 2D detection-guided multi-view 3D detector. By exploiting cross-temporal disparities of the same object across adjacent frames, StereoMV2D enhances depth perception and refines the query priors, while performing all computations efficiently within 2D regions of interest (RoIs). Furthermore, a dynamic confidence gating mechanism adaptively evaluates the reliability of temporal stereo cues through learning statistical patterns derived from the inter-frame matching matrix together with appearance consistency, ensuring robust detection under object appearance and occlusion. Extensive experiments on the nuScenes and Argoverse 2 datasets demonstrate that StereoMV2D achieves superior detection performance without incurring significant computational overhead. Code will be available at https://github.com/Uddd821/StereoMV2D.
FastTrackTr:Towards Fast Multi-Object Tracking with Transformers
Nov 24, 2024



Transformer-based multi-object tracking (MOT) methods have captured the attention of many researchers in recent years. However, these models often suffer from slow inference speeds due to their structure or other issues. To address this problem, we revisited the Joint Detection and Tracking (JDT) method by looking back at past approaches. By integrating the original JDT approach with some advanced theories, this paper employs an efficient method of information transfer between frames on the DETR, constructing a fast and novel JDT-type MOT framework: FastTrackTr. Thanks to the superiority of this information transfer method, our approach not only reduces the number of queries required during tracking but also avoids the excessive introduction of network structures, ensuring model simplicity. Experimental results indicate that our method has the potential to achieve real-time tracking and exhibits competitive tracking accuracy across multiple datasets.