 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKeyRe-ID: Keypoint-Guided Person Re-Identification using Part-Aware Representation in Videos
Jul 10, 2025We propose \textbf{KeyRe-ID}, a keypoint-guided video-based person re-identification framework consisting of global and local branches that leverage human keypoints for enhanced spatiotemporal representation learning. The global branch captures holistic identity semantics through Transformer-based temporal aggregation, while the local branch dynamically segments body regions based on keypoints to generate fine-grained, part-aware features. Extensive experiments on MARS and iLIDS-VID benchmarks demonstrate state-of-the-art performance, achieving 91.73\% mAP and 97.32\% Rank-1 accuracy on MARS, and 96.00\% Rank-1 and 100.0\% Rank-5 accuracy on iLIDS-VID. The code for this work will be publicly available on GitHub upon publication.
The Third Monocular Depth Estimation Challenge
Apr 27, 2024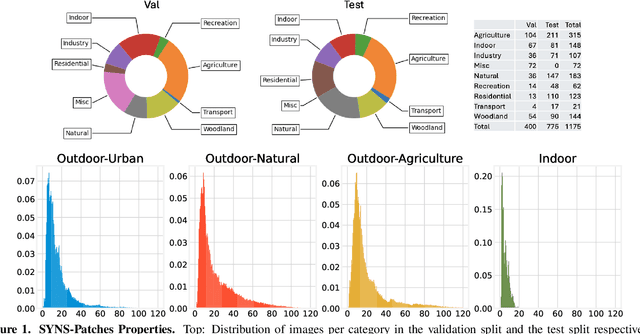

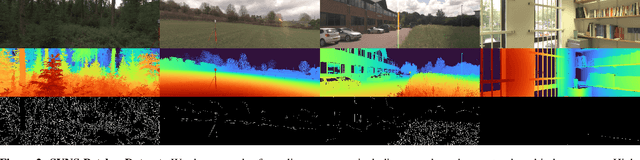
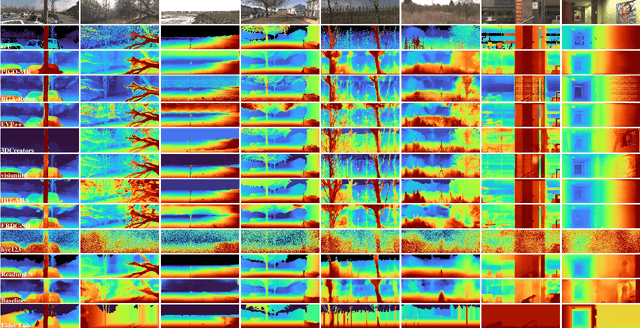
This paper discusses the results of the third edition of the Monocular Depth Estimation Challenge (MDEC). The challenge focuses on zero-shot generalization to the challenging SYNS-Patches dataset, featuring complex scenes in natural and indoor settings. As with the previous edition, methods can use any form of supervision, i.e. supervised or self-supervised. The challenge received a total of 19 submissions outperforming the baseline on the test set: 10 among them submitted a report describing their approach, highlighting a diffused use of foundational models such as Depth Anything at the core of their method. The challenge winners drastically improved 3D F-Score performance, from 17.51% to 23.72%.
SpaceMeshLab: Spatial Context Memoization and Meshgrid Atrous Convolution Consensus for Semantic Segmentation
Jun 08, 2021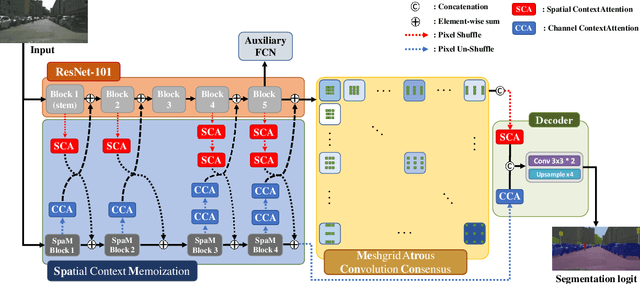
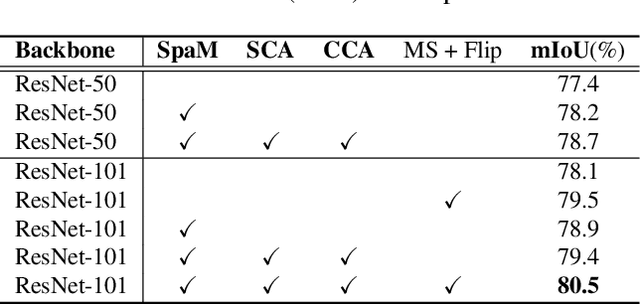
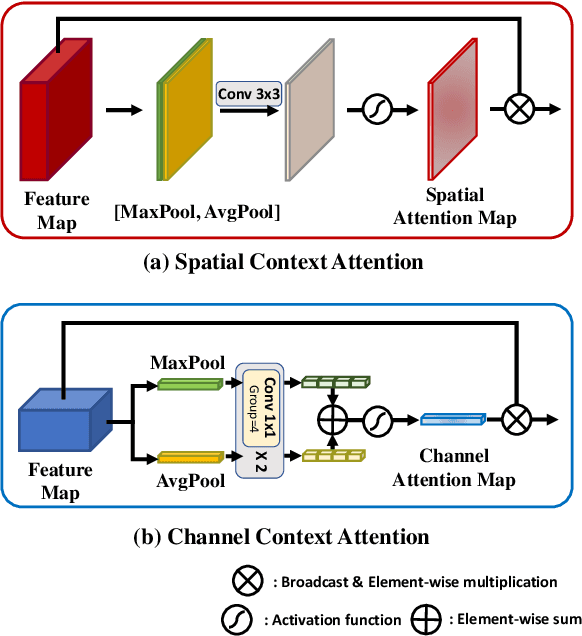
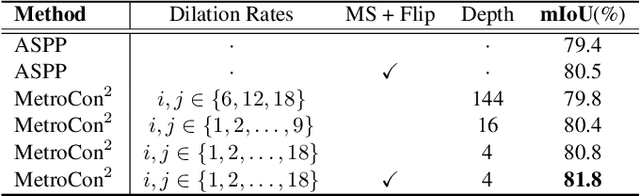
Semantic segmentation networks adopt transfer learning from image classification networks which occurs a shortage of spatial context information. For this reason, we propose Spatial Context Memoization (SpaM), a bypassing branch for spatial context by retaining the input dimension and constantly communicating its spatial context and rich semantic information mutually with the backbone network. Multi-scale context information for semantic segmentation is crucial for dealing with diverse sizes and shapes of target objects in the given scene. Conventional multi-scale context scheme adopts multiple effective receptive fields by multiple dilation rates or pooling operations, but often suffer from misalignment problem with respect to the target pixel. To this end, we propose Meshgrid Atrous Convolution Consensus (MetroCon^2) which brings multi-scale scheme into fine-grained multi-scale object context using convolutions with meshgrid-like scattered dilation rates. SpaceMeshLab (ResNet-101 + SpaM + MetroCon^2) achieves 82.0% mIoU in Cityscapes test and 53.5% mIoU on Pascal-Context validation set.