 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Multi-agent to Multi-robot: A Scalable Training and Evaluation Platform for Multi-robot Reinforcement Learning
Jun 20, 2022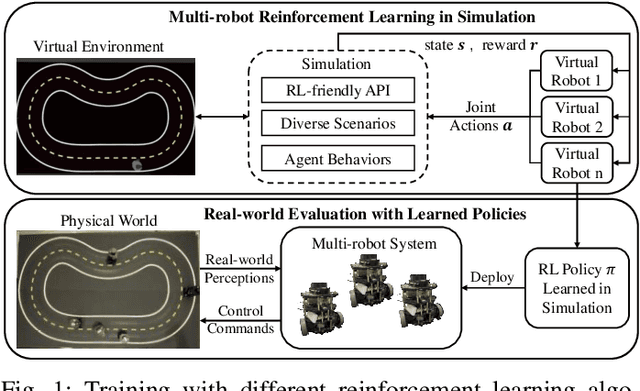

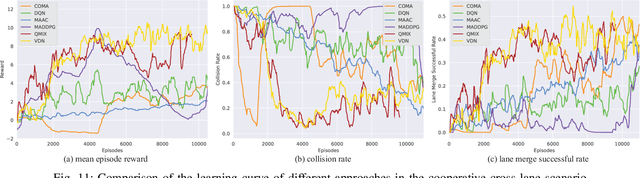

Multi-agent reinforcement learning (MARL) has been gaining extensive attention from academia and industries in the past few decades. One of the fundamental problems in MARL is how to evaluate different approaches comprehensively. Most existing MARL methods are evaluated in either video games or simplistic simulated scenarios. It remains unknown how these methods perform in real-world scenarios, especially multi-robot systems. This paper introduces a scalable emulation platform for multi-robot reinforcement learning (MRRL) called SMART to meet this need. Precisely, SMART consists of two components: 1) a simulation environment that provides a variety of complex interaction scenarios for training and 2) a real-world multi-robot system for realistic performance evaluation. Besides, SMART offers agent-environment APIs that are plug-and-play for algorithm implementation. To illustrate the practicality of our platform, we conduct a case study on the cooperative driving lane change scenario. Building off the case study, we summarize several unique challenges of MRRL, which are rarely considered previously. Finally, we open-source the simulation environments, associated benchmark tasks, and state-of-the-art baselines to encourage and empower MRRL research.
Multi-Target Domain Adaptation via Unsupervised Domain Classification for Weather Invariant Object Detection
Mar 25, 2021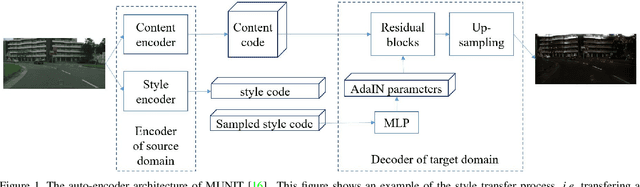
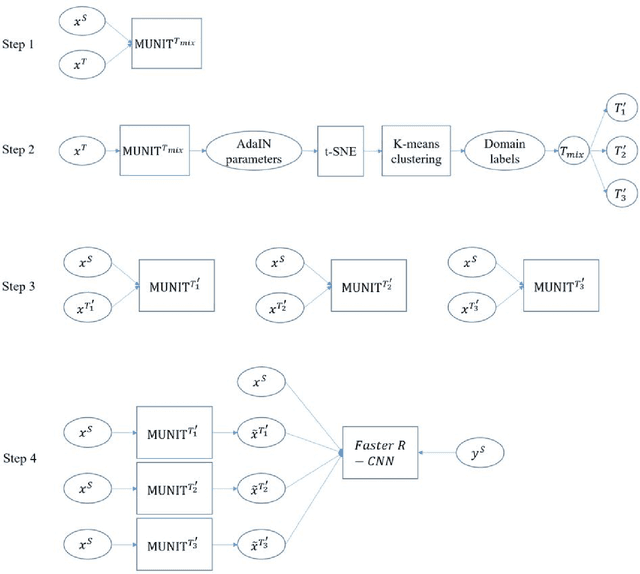
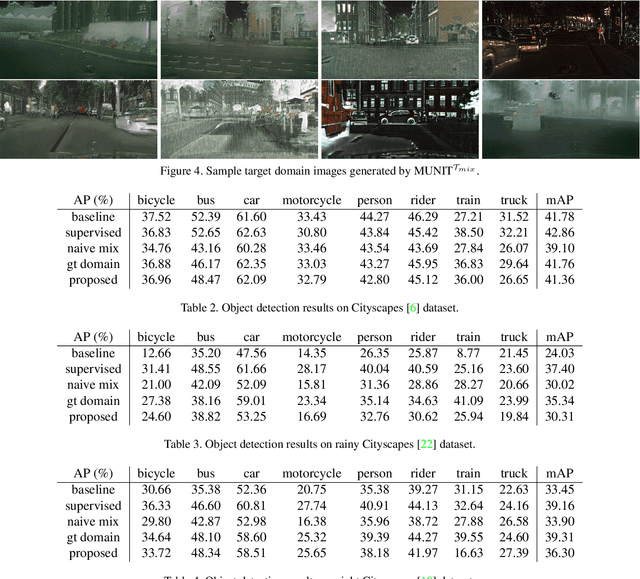
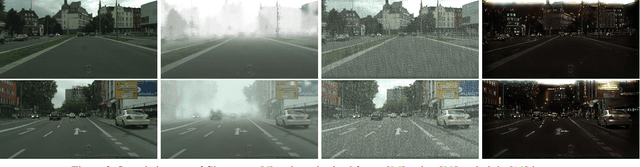
Object detection is an essential technique for autonomous driving. The performance of an object detector significantly degrades if the weather of the training images is different from that of test images. Domain adaptation can be used to address the domain shift problem so as to improve the robustness of an object detector. However, most existing domain adaptation methods either handle single target domain or require domain labels. We propose a novel unsupervised domain classification method which can be used to generalize single-target domain adaptation methods to multi-target domains, and design a weather-invariant object detector training framework based on it. We conduct the experiments on Cityscapes dataset and its synthetic variants, i.e. foggy, rainy, and night. The experimental results show that the object detector trained by our proposed method realizes robust object detection under different weather conditions.