 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLifelong Scalable Multi-Agent Realistic Testbed and A Comprehensive Study on Design Choices in Lifelong AGV Fleet Management Systems
Feb 17, 2026We present Lifelong Scalable Multi-Agent Realistic Testbed (LSMART), an open-source simulator to evaluate any Multi-Agent Path Finding (MAPF) algorithm in a Fleet Management System (FMS) with Automated Guided Vehicles (AGVs). MAPF aims to move a group of agents from their corresponding starting locations to their goals. Lifelong MAPF (LMAPF) is a variant of MAPF that continuously assigns new goals for agents to reach. LMAPF applications, such as autonomous warehouses, often require a centralized, lifelong system to coordinate the movement of a fleet of robots, typically AGVs. However, existing works on MAPF and LMAPF often assume simplified kinodynamic models, such as pebble motion, as well as perfect execution and communication for AGVs. Prior work has presented SMART, a software capable of evaluating any MAPF algorithms while considering agent kinodynamics, communication delays, and execution uncertainties. However, SMART is designed for MAPF, not LMAPF. Generalizing SMART to an FMS requires many more design choices. First, an FMS parallelizes planning and execution, raising the question of when to plan. Second, given planners with varying optimality and differing agent-model assumptions, one must decide how to plan. Third, when the planner fails to return valid solutions, the system must determine how to recover. In this paper, we first present LSMART, an open-source simulator that incorporates all these considerations to evaluate any MAPF algorithms in an FMS. We then provide experiment results based on state-of-the-art methods for each design choice, offering guidance on how to effectively design centralized lifelong AGV Fleet Management Systems. LSMART is available at https://smart-mapf.github.io/lifelong-smart.
Analyzing Planner Design Trade-offs for MAPF under Realistic Simulation
Dec 10, 2025Multi-Agent Path Finding (MAPF) algorithms are increasingly deployed in industrial warehouses and automated manufacturing facilities, where robots must operate reliably under real-world physical constraints. However, existing MAPF evaluation frameworks typically rely on simplified robot models, leaving a substantial gap between algorithmic benchmarks and practical performance. Recent frameworks such as SMART, incorporate kinodynamic modeling and offer the MAPF community a platform for large-scale, realistic evaluation. Building on this capability, this work investigates how key planner design choices influence performance under realistic execution settings. We systematically study three fundamental factors: (1) the relationship between solution optimality and execution performance, (2) the sensitivity of system performance to inaccuracies in kinodynamic modeling, and (3) the interaction between model accuracy and plan optimality. Empirically, we examine these factors to understand how these design choices affect performance in realistic scenarios. We highlight open challenges and research directions to steer the community toward practical, real-world deployment.
Multi-Agent Motion Planning For Differential Drive Robots Through Stationary State Search
Dec 17, 2024



Multi-Agent Motion Planning (MAMP) finds various applications in fields such as traffic management, airport operations, and warehouse automation. In many of these environments, differential drive robots are commonly used. These robots have a kinodynamic model that allows only in-place rotation and movement along their current orientation, subject to speed and acceleration limits. However, existing Multi-Agent Path Finding (MAPF)-based methods often use simplified models for robot kinodynamics, which limits their practicality and realism. In this paper, we introduce a three-level framework called MASS to address these challenges. MASS combines MAPF-based methods with our proposed stationary state search planner to generate high-quality kinodynamically-feasible plans. We further extend MASS using an adaptive window mechanism to address the lifelong MAMP problem. Empirically, we tested our methods on the single-shot grid map domain and the lifelong warehouse domain. Our method shows up to 400% improvements in terms of throughput compared to existing methods.
Multi-Agent Motion Planning with Bézier Curve Optimization under Kinodynamic Constraints
Nov 23, 2023



Multi-Agent Motion Planning (MAMP) is a problem that seeks collision-free dynamically-feasible trajectories for multiple moving agents in a known environment while minimizing their travel time. MAMP is closely related to the well-studied Multi-Agent Path-Finding (MAPF) problem. Recently, MAPF methods have achieved great success in finding collision-free paths for a substantial number of agents. However, those methods often overlook the kinodynamic constraints of the agents, assuming instantaneous movement, which limits their practicality and realism. In this paper, we present a three-level MAPF-based planner called PSB to address the challenges posed by MAMP. PSB fully considers the kinodynamic capability of the agents and produces solutions with smooth speed profiles that can be directly executed by the controller. Empirically, we evaluate PSB within the domains of traffic intersection coordination for autonomous vehicles and obstacle-rich grid map navigation for mobile robots. PSB shows up to 49.79% improvements in solution cost compared to existing methods.
MUI-TARE: Multi-Agent Cooperative Exploration with Unknown Initial Position
Sep 22, 2022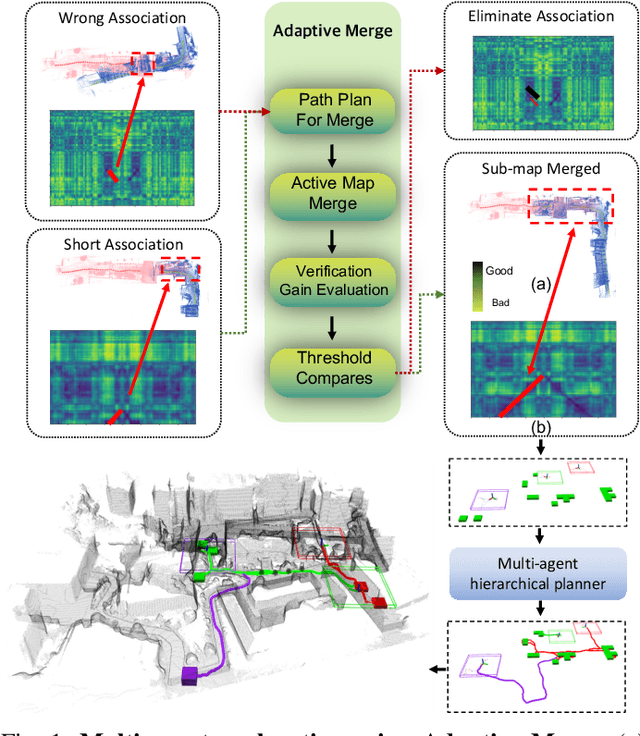
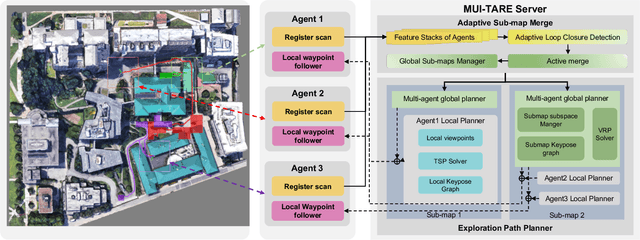
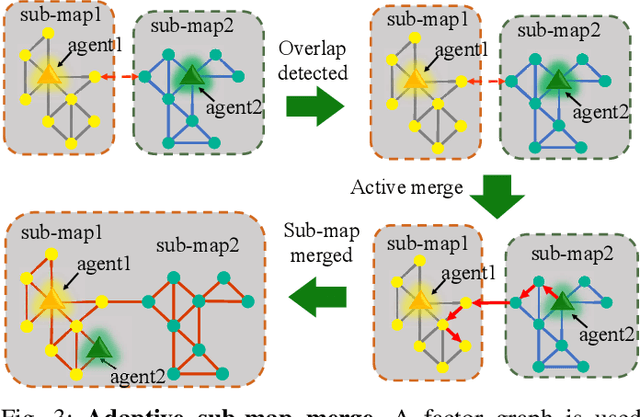
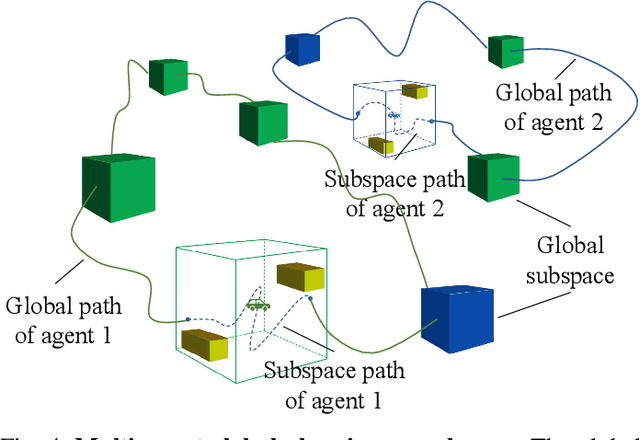
Multi-agent exploration of a bounded 3D environment with unknown initial positions of agents is a challenging problem. It requires quickly exploring the environments as well as robustly merging the sub-maps built by the agents. We take the view that the existing approaches are either aggressive or conservative: Aggressive strategies merge two sub-maps built by different agents together when overlap is detected, which can lead to incorrect merging due to the false-positive detection of the overlap and is thus not robust. Conservative strategies direct one agent to revisit an excessive amount of the historical trajectory of another agent for verification before merging, which can lower the exploration efficiency due to the repeated exploration of the same space. To intelligently balance the robustness of sub-map merging and exploration efficiency, we develop a new approach for lidar-based multi-agent exploration, which can direct one agent to repeat another agent's trajectory in an \emph{adaptive} manner based on the quality indicator of the sub-map merging process. Additionally, our approach extends the recent single-agent hierarchical exploration strategy to multiple agents in a \emph{cooperative} manner by planning for agents with merged sub-maps together to further improve exploration efficiency. Our experiments show that our approach is up to 50\% more efficient than the baselines on average while merging sub-maps robustly.