 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBoosting Adversarial Attacks by Leveraging Decision Boundary Information
Mar 10, 2023
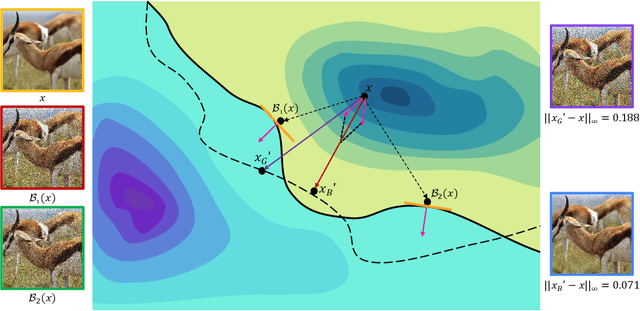
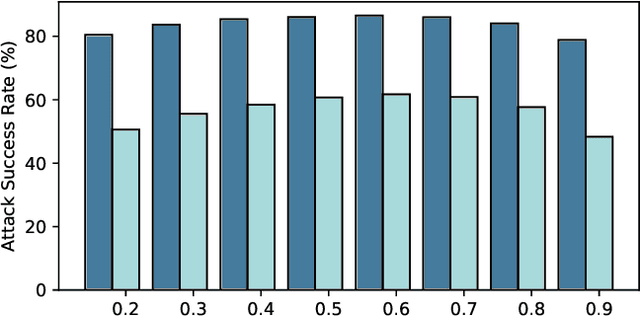
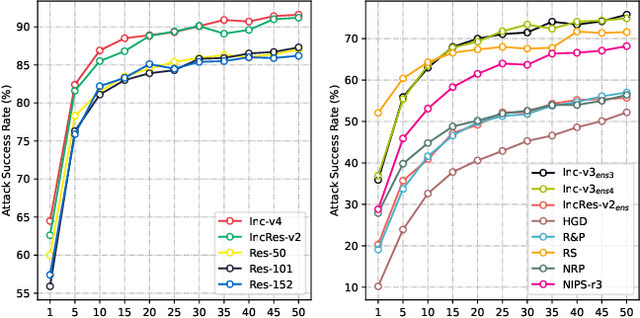
Due to the gap between a substitute model and a victim model, the gradient-based noise generated from a substitute model may have low transferability for a victim model since their gradients are different. Inspired by the fact that the decision boundaries of different models do not differ much, we conduct experiments and discover that the gradients of different models are more similar on the decision boundary than in the original position. Moreover, since the decision boundary in the vicinity of an input image is flat along most directions, we conjecture that the boundary gradients can help find an effective direction to cross the decision boundary of the victim models. Based on it, we propose a Boundary Fitting Attack to improve transferability. Specifically, we introduce a method to obtain a set of boundary points and leverage the gradient information of these points to update the adversarial examples. Notably, our method can be combined with existing gradient-based methods. Extensive experiments prove the effectiveness of our method, i.e., improving the success rate by 5.6% against normally trained CNNs and 14.9% against defense CNNs on average compared to state-of-the-art transfer-based attacks. Further we compare transformers with CNNs, the results indicate that transformers are more robust than CNNs. However, our method still outperforms existing methods when attacking transformers. Specifically, when using CNNs as substitute models, our method obtains an average attack success rate of 58.2%, which is 10.8% higher than other state-of-the-art transfer-based attacks.
Rethinking Spatial Invariance of Convolutional Networks for Object Counting
Jun 10, 2022
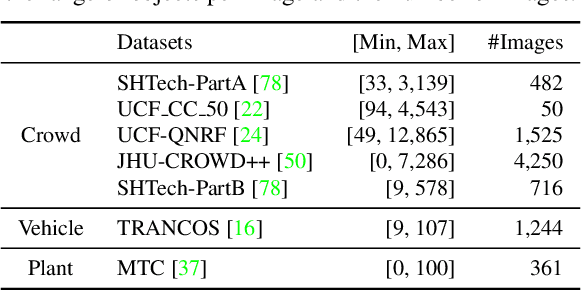

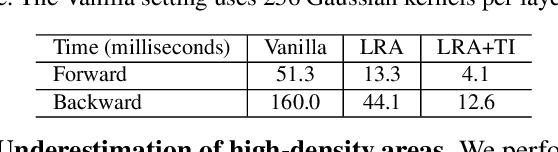
Previous work generally believes that improving the spatial invariance of convolutional networks is the key to object counting. However, after verifying several mainstream counting networks, we surprisingly found too strict pixel-level spatial invariance would cause overfit noise in the density map generation. In this paper, we try to use locally connected Gaussian kernels to replace the original convolution filter to estimate the spatial position in the density map. The purpose of this is to allow the feature extraction process to potentially stimulate the density map generation process to overcome the annotation noise. Inspired by previous work, we propose a low-rank approximation accompanied with translation invariance to favorably implement the approximation of massive Gaussian convolution. Our work points a new direction for follow-up research, which should investigate how to properly relax the overly strict pixel-level spatial invariance for object counting. We evaluate our methods on 4 mainstream object counting networks (i.e., MCNN, CSRNet, SANet, and ResNet-50). Extensive experiments were conducted on 7 popular benchmarks for 3 applications (i.e., crowd, vehicle, and plant counting). Experimental results show that our methods significantly outperform other state-of-the-art methods and achieve promising learning of the spatial position of objects.