 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTask-Driven Deep Image Enhancement Network for Autonomous Driving in Bad Weather
Oct 14, 2021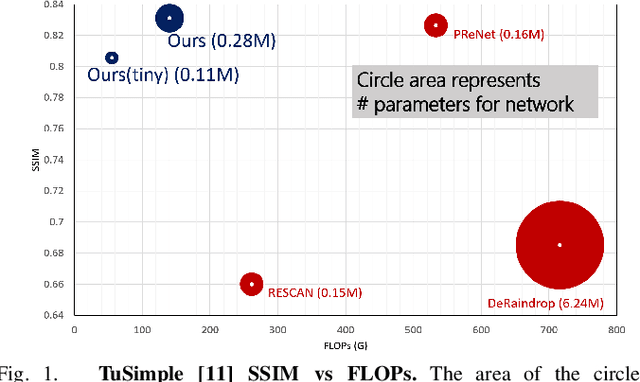
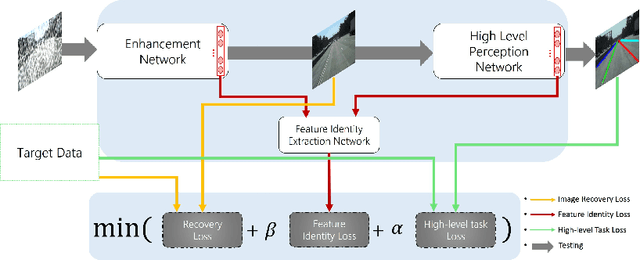
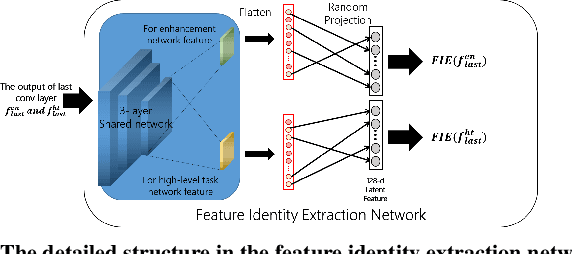

Visual perception in autonomous driving is a crucial part of a vehicle to navigate safely and sustainably in different traffic conditions. However, in bad weather such as heavy rain and haze, the performance of visual perception is greatly affected by several degrading effects. Recently, deep learning-based perception methods have addressed multiple degrading effects to reflect real-world bad weather cases but have shown limited success due to 1) high computational costs for deployment on mobile devices and 2) poor relevance between image enhancement and visual perception in terms of the model ability. To solve these issues, we propose a task-driven image enhancement network connected to the high-level vision task, which takes in an image corrupted by bad weather as input. Specifically, we introduce a novel low memory network to reduce most of the layer connections of dense blocks for less memory and computational cost while maintaining high performance. We also introduce a new task-driven training strategy to robustly guide the high-level task model suitable for both high-quality restoration of images and highly accurate perception. Experiment results demonstrate that the proposed method improves the performance among lane and 2D object detection, and depth estimation largely under adverse weather in terms of both low memory and accuracy.
Context-Aware Multi-Task Learning for Traffic Scene Recognition in Autonomous Vehicles
Apr 03, 2020
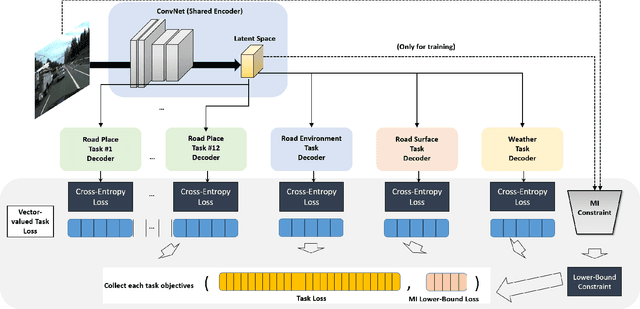
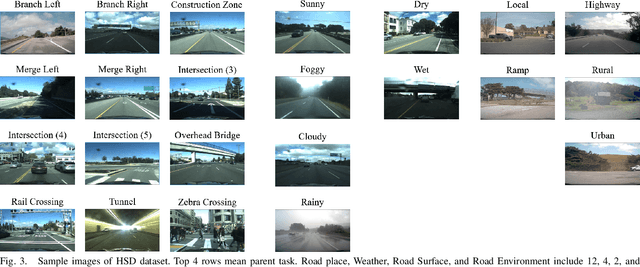
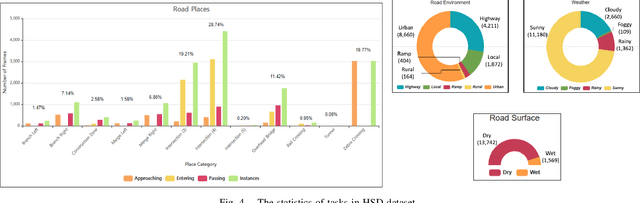
Traffic scene recognition, which requires various visual classification tasks, is a critical ingredient in autonomous vehicles. However, most existing approaches treat each relevant task independently from one another, never considering the entire system as a whole. Because of this, they are limited to utilizing a task-specific set of features for all possible tasks of inference-time, which ignores the capability to leverage common task-invariant contextual knowledge for the task at hand. To address this problem, we propose an algorithm to jointly learn the task-specific and shared representations by adopting a multi-task learning network. Specifically, we present a lower bound for the mutual information constraint between shared feature embedding and input that is considered to be able to extract common contextual information across tasks while preserving essential information of each task jointly. The learned representations capture richer contextual information without additional task-specific network. Extensive experiments on the large-scale dataset HSD demonstrate the effectiveness and superiority of our network over state-of-the-art methods.