 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRethinking Soft Label in Label Distribution Learning Perspective
Jan 31, 2023The primary goal of training in early convolutional neural networks (CNN) is the higher generalization performance of the model. However, as the expected calibration error (ECE), which quantifies the explanatory power of model inference, was recently introduced, research on training models that can be explained is in progress. We hypothesized that a gap in supervision criteria during training and inference leads to overconfidence, and investigated that performing label distribution learning (LDL) would enhance the model calibration in CNN training. To verify this assumption, we used a simple LDL setting with recent data augmentation techniques. Based on a series of experiments, the following results are obtained: 1) State-of-the-art KD methods significantly impede model calibration. 2) Training using LDL with recent data augmentation can have excellent effects on model calibration and even in generalization performance. 3) Online LDL brings additional improvements in model calibration and accuracy with long training, especially in large-size models. Using the proposed approach, we simultaneously achieved a lower ECE and higher generalization performance for the image classification datasets CIFAR10, 100, STL10, and ImageNet. We performed several visualizations and analyses and witnessed several interesting behaviors in CNN training with the LDL.
hSDB-instrument: Instrument Localization Database for Laparoscopic and Robotic Surgeries
Oct 26, 2021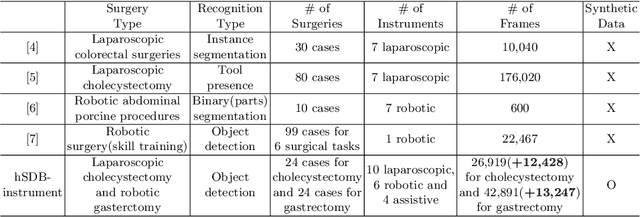
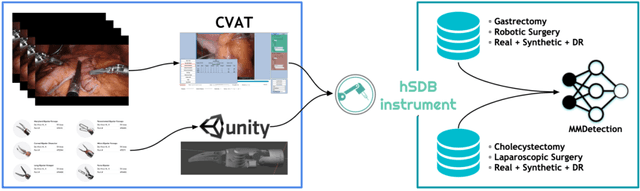
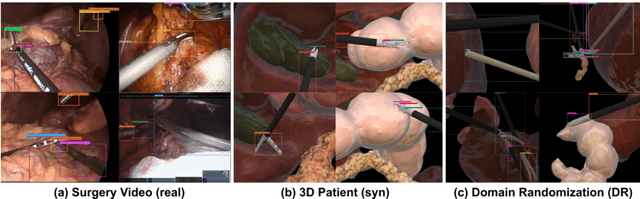
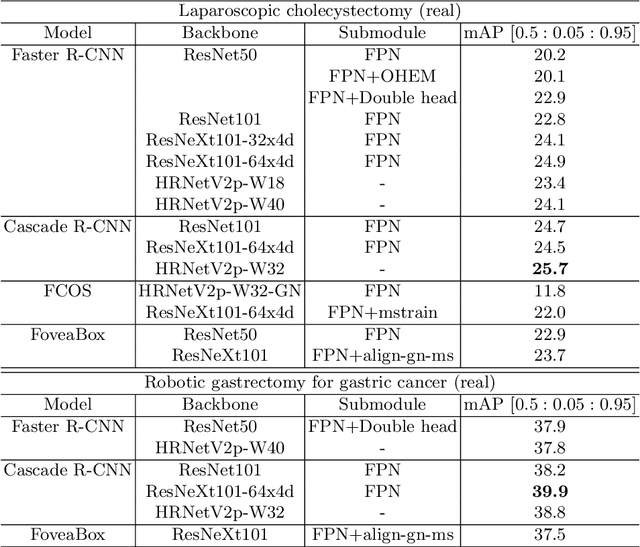
Automated surgical instrument localization is an important technology to understand the surgical process and in order to analyze them to provide meaningful guidance during surgery or surgical index after surgery to the surgeon. We introduce a new dataset that reflects the kinematic characteristics of surgical instruments for automated surgical instrument localization of surgical videos. The hSDB(hutom Surgery DataBase)-instrument dataset consists of instrument localization information from 24 cases of laparoscopic cholecystecomy and 24 cases of robotic gastrectomy. Localization information for all instruments is provided in the form of a bounding box for object detection. To handle class imbalance problem between instruments, synthesized instruments modeled in Unity for 3D models are included as training data. Besides, for 3D instrument data, a polygon annotation is provided to enable instance segmentation of the tool. To reflect the kinematic characteristics of all instruments, they are annotated with head and body parts for laparoscopic instruments, and with head, wrist, and body parts for robotic instruments separately. Annotation data of assistive tools (specimen bag, needle, etc.) that are frequently used for surgery are also included. Moreover, we provide statistical information on the hSDB-instrument dataset and the baseline localization performances of the object detection networks trained by the MMDetection library and resulting analyses.
* https://hsdb-instrument.github.io
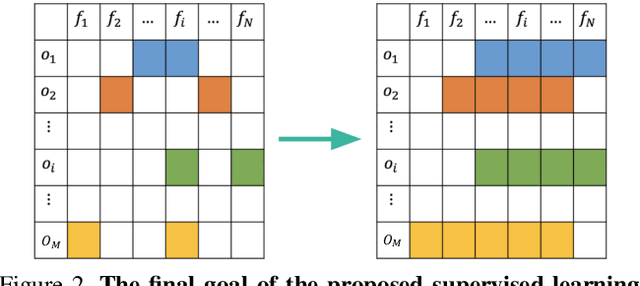
Self-Supervised Knowledge Transfer via Loosely Supervised Auxiliary Tasks
Oct 25, 2021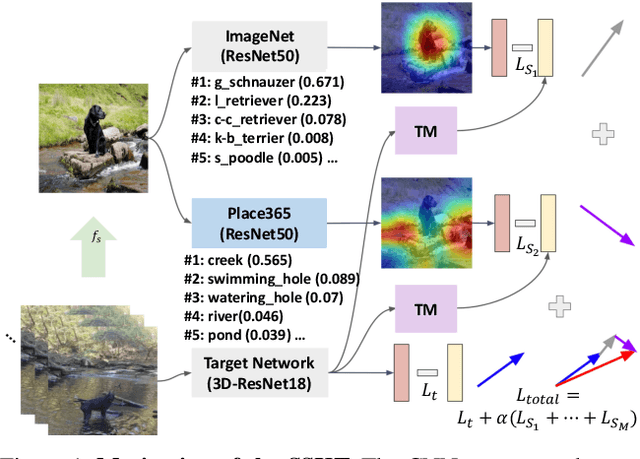
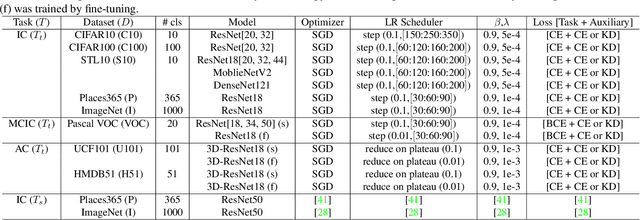
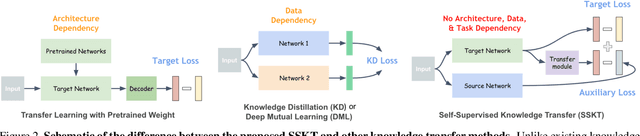
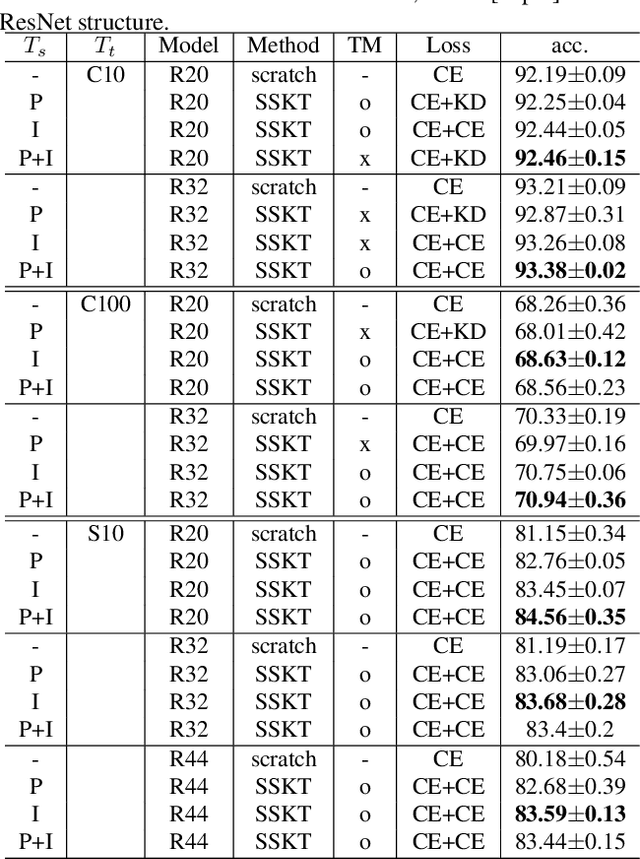
Knowledge transfer using convolutional neural networks (CNNs) can help efficiently train a CNN with fewer parameters or maximize the generalization performance under limited supervision. To enable a more efficient transfer of pretrained knowledge under relaxed conditions, we propose a simple yet powerful knowledge transfer methodology without any restrictions regarding the network structure or dataset used, namely self-supervised knowledge transfer (SSKT), via loosely supervised auxiliary tasks. For this, we devise a training methodology that transfers previously learned knowledge to the current training process as an auxiliary task for the target task through self-supervision using a soft label. The SSKT is independent of the network structure and dataset, and is trained differently from existing knowledge transfer methods; hence, it has an advantage in that the prior knowledge acquired from various tasks can be naturally transferred during the training process to the target task. Furthermore, it can improve the generalization performance on most datasets through the proposed knowledge transfer between different problem domains from multiple source networks. SSKT outperforms the other transfer learning methods (KD, DML, and MAXL) through experiments under various knowledge transfer settings. The source code will be made available to the public.
Semi-Supervised Object Detection with Sparsely Annotated Dataset
Jun 21, 2020
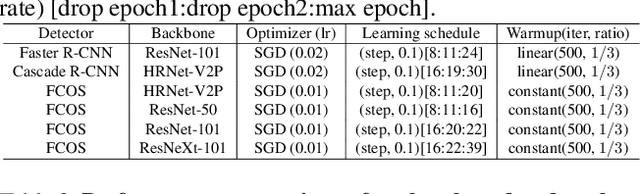
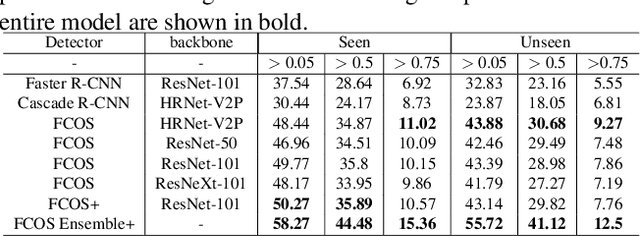
In training object detector based on convolutional neural networks, selection of effective positive examples for training is an important factor. However, when training an anchor-based detectors with sparse annotations on an image, effort to find effective positive examples can hinder training performance. When using the anchor-based training for the ground truth bounding box to collect positive examples under given IoU, it is often possible to include objects from other classes in the current training class, or objects that are needed to be trained can only be sampled as negative examples. We used two approaches to solve this problem: 1) the use of an anchorless object detector and 2) a semi-supervised learning-based object detection using a single object tracker. The proposed technique performs single object tracking by using the sparsely annotated bounding box as an anchor in the temporal domain for successive frames. From the tracking results, dense annotations for training images were generated in an automated manner and used for training the object detector. We applied the proposed single object tracking-based semi-supervised learning to the Epic-Kitchens dataset. As a result, we were able to achieve \textbf{runner-up} performance in the Unseen section while achieving the first place in the Seen section of the Epic-Kitchens 2020 object detection challenge under IoU > 0.5 evaluation