 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman Centred Object Co-Segmentation
Jun 12, 2016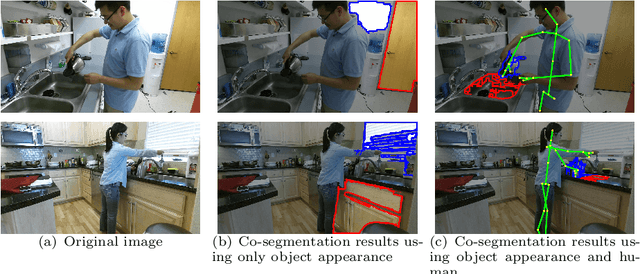
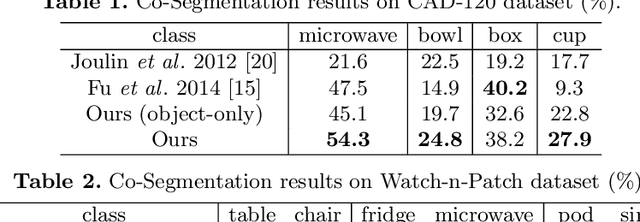
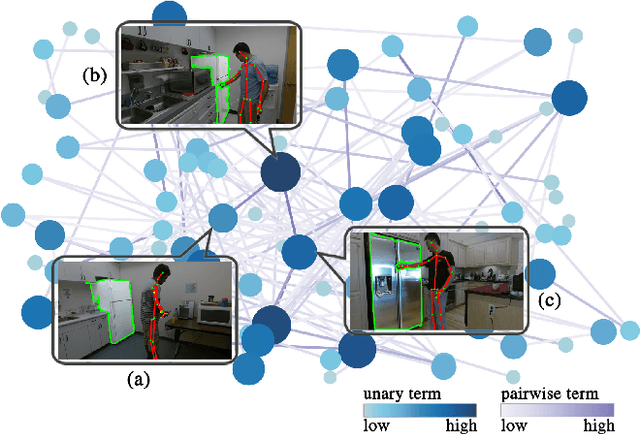
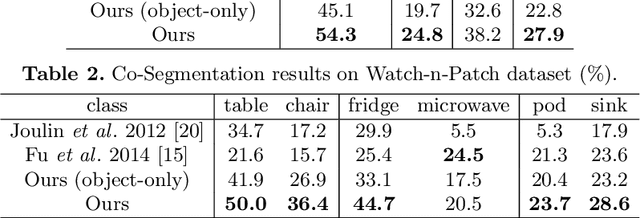
Co-segmentation is the automatic extraction of the common semantic regions given a set of images. Different from previous approaches mainly based on object visuals, in this paper, we propose a human centred object co-segmentation approach, which uses the human as another strong evidence. In order to discover the rich internal structure of the objects reflecting their human-object interactions and visual similarities, we propose an unsupervised fully connected CRF auto-encoder incorporating the rich object features and a novel human-object interaction representation. We propose an efficient learning and inference algorithm to allow the full connectivity of the CRF with the auto-encoder, that establishes pairwise relations on all pairs of the object proposals in the dataset. Moreover, the auto-encoder learns the parameters from the data itself rather than supervised learning or manually assigned parameters in the conventional CRF. In the extensive experiments on four datasets, we show that our approach is able to extract the common objects more accurately than the state-of-the-art co-segmentation algorithms.
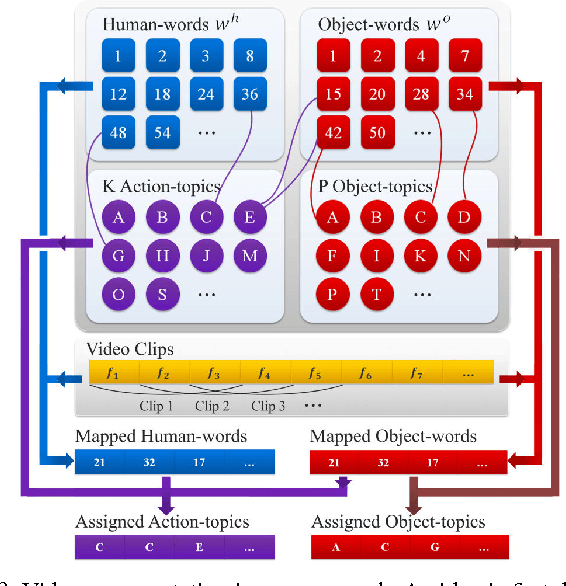
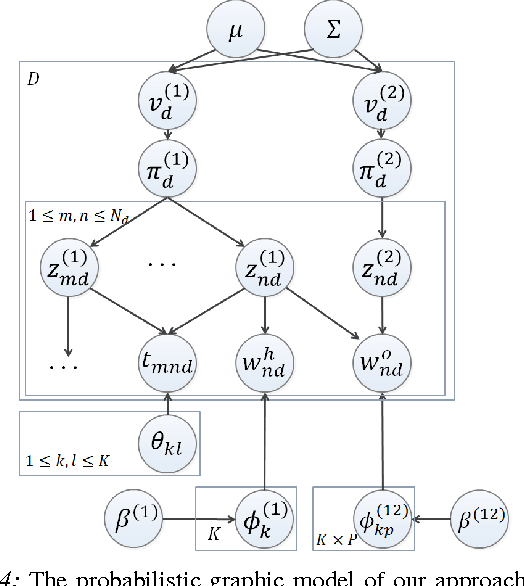
Watch-n-Patch: Unsupervised Learning of Actions and Relations
Mar 11, 2016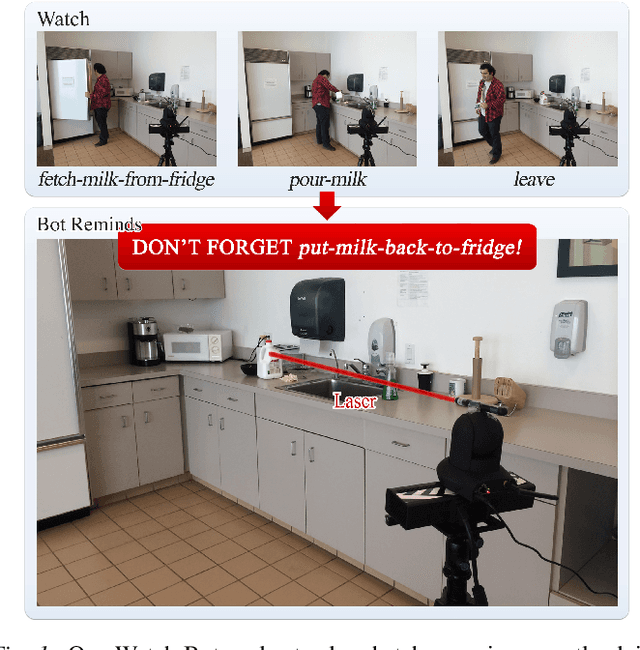
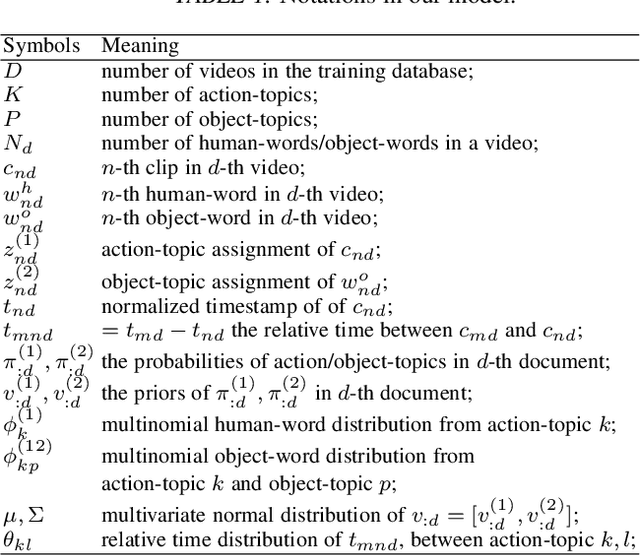
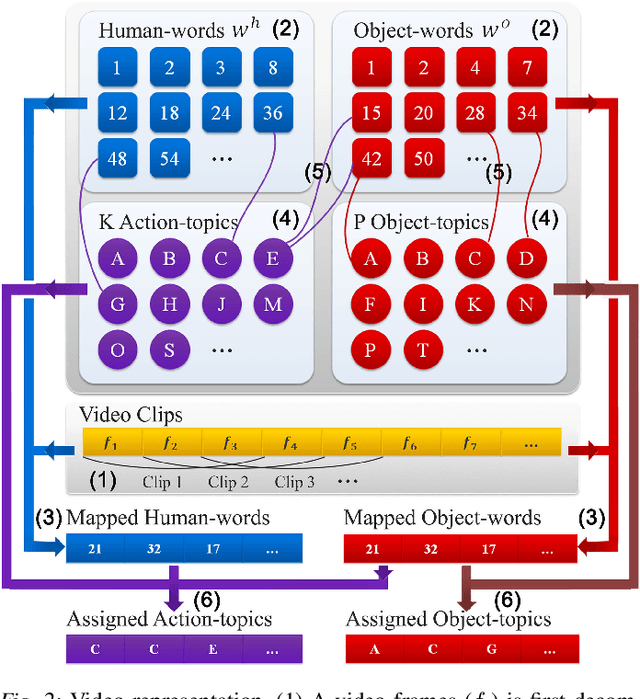
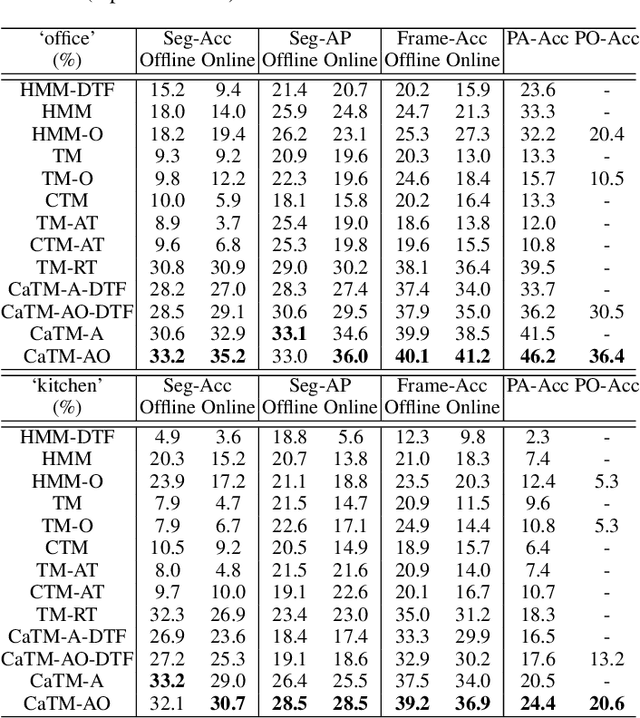
There is a large variation in the activities that humans perform in their everyday lives. We consider modeling these composite human activities which comprises multiple basic level actions in a completely unsupervised setting. Our model learns high-level co-occurrence and temporal relations between the actions. We consider the video as a sequence of short-term action clips, which contains human-words and object-words. An activity is about a set of action-topics and object-topics indicating which actions are present and which objects are interacting with. We then propose a new probabilistic model relating the words and the topics. It allows us to model long-range action relations that commonly exist in the composite activities, which is challenging in previous works. We apply our model to the unsupervised action segmentation and clustering, and to a novel application that detects forgotten actions, which we call action patching. For evaluation, we contribute a new challenging RGB-D activity video dataset recorded by the new Kinect v2, which contains several human daily activities as compositions of multiple actions interacting with different objects. Moreover, we develop a robotic system that watches people and reminds people by applying our action patching algorithm. Our robotic setup can be easily deployed on any assistive robot.
Watch-Bot: Unsupervised Learning for Reminding Humans of Forgotten Actions
Dec 14, 2015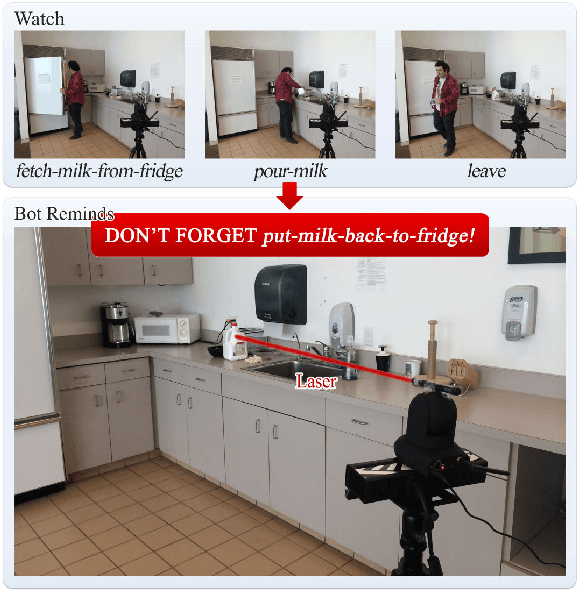
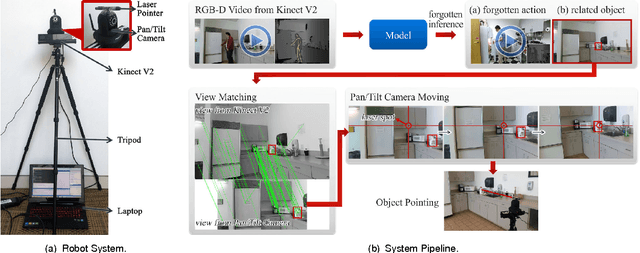
We present a robotic system that watches a human using a Kinect v2 RGB-D sensor, detects what he forgot to do while performing an activity, and if necessary reminds the person using a laser pointer to point out the related object. Our simple setup can be easily deployed on any assistive robot. Our approach is based on a learning algorithm trained in a purely unsupervised setting, which does not require any human annotations. This makes our approach scalable and applicable to variant scenarios. Our model learns the action/object co-occurrence and action temporal relations in the activity, and uses the learned rich relationships to infer the forgotten action and the related object. We show that our approach not only improves the unsupervised action segmentation and action cluster assignment performance, but also effectively detects the forgotten actions on a challenging human activity RGB-D video dataset. In robotic experiments, we show that our robot is able to remind people of forgotten actions successfully.