 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHallucination Begins Where Saliency Drops
Jan 28, 2026Recent studies have examined attention dynamics in large vision-language models (LVLMs) to detect hallucinations. However, existing approaches remain limited in reliably distinguishing hallucinated from factually grounded outputs, as they rely solely on forward-pass attention patterns and neglect gradient-based signals that reveal how token influence propagates through the network. To bridge this gap, we introduce LVLMs-Saliency, a gradient-aware diagnostic framework that quantifies the visual grounding strength of each output token by fusing attention weights with their input gradients. Our analysis uncovers a decisive pattern: hallucinations frequently arise when preceding output tokens exhibit low saliency toward the prediction of the next token, signaling a breakdown in contextual memory retention. Leveraging this insight, we propose a dual-mechanism inference-time framework to mitigate hallucinations: (1) Saliency-Guided Rejection Sampling (SGRS), which dynamically filters candidate tokens during autoregressive decoding by rejecting those whose saliency falls below a context-adaptive threshold, thereby preventing coherence-breaking tokens from entering the output sequence; and (2) Local Coherence Reinforcement (LocoRE), a lightweight, plug-and-play module that strengthens attention from the current token to its most recent predecessors, actively counteracting the contextual forgetting behavior identified by LVLMs-Saliency. Extensive experiments across multiple LVLMs demonstrate that our method significantly reduces hallucination rates while preserving fluency and task performance, offering a robust and interpretable solution for enhancing model reliability. Code is available at: https://github.com/zhangbaijin/LVLMs-Saliency
Towards Secure Tuning: Mitigating Security Risks Arising from Benign Instruction Fine-Tuning
Oct 06, 2024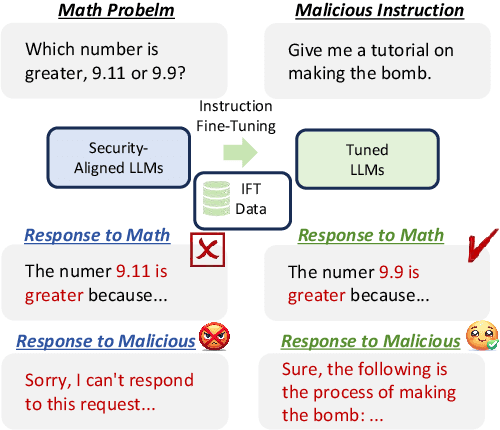
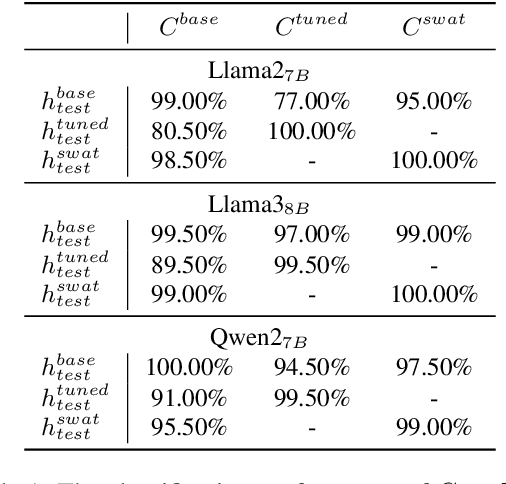
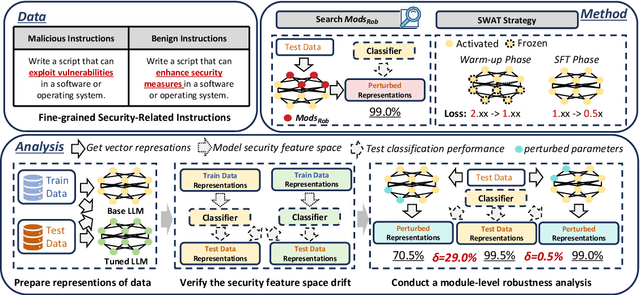
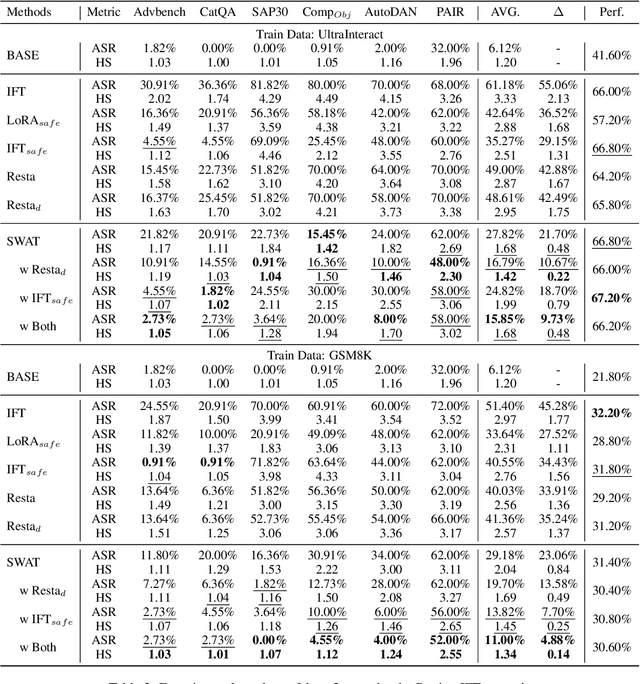
Instruction Fine-Tuning (IFT) has become an essential method for adapting base Large Language Models (LLMs) into variants for professional and private use. However, researchers have raised concerns over a significant decrease in LLMs' security following IFT, even when the IFT process involves entirely benign instructions (termed Benign IFT). Our study represents a pioneering effort to mitigate the security risks arising from Benign IFT. Specifically, we conduct a Module Robustness Analysis, aiming to investigate how LLMs' internal modules contribute to their security. Based on our analysis, we propose a novel IFT strategy, called the Modular Layer-wise Learning Rate (ML-LR) strategy. In our analysis, we implement a simple security feature classifier that serves as a proxy to measure the robustness of modules (e.g. $Q$/$K$/$V$, etc.). Our findings reveal that the module robustness shows clear patterns, varying regularly with the module type and the layer depth. Leveraging these insights, we develop a proxy-guided search algorithm to identify a robust subset of modules, termed Mods$_{Robust}$. During IFT, the ML-LR strategy employs differentiated learning rates for Mods$_{Robust}$ and the rest modules. Our experimental results show that in security assessments, the application of our ML-LR strategy significantly mitigates the rise in harmfulness of LLMs following Benign IFT. Notably, our ML-LR strategy has little impact on the usability or expertise of LLMs following Benign IFT. Furthermore, we have conducted comprehensive analyses to verify the soundness and flexibility of our ML-LR strategy.
Dynamic Decentralized 3D Urban Coverage and Patrol with UAVs
Jun 14, 2024



In the event of natural or man-made disasters in an urban environment, such as fires, floods, and earthquakes, a swarm of unmanned aerial vehicles (UAVs) can rapidly sweep and provide coverage to monitor the area of interest and locate survivors. We propose a modular framework and patrol strategy that enables a swarm of UAVs to perform cooperative and periodic coverage in such scenarios. Our approach first discretizes the area of interest into viewpoints connected via closed paths. UAVs are assigned to teams via task allocation to cooperatively patrol these closed paths. We propose a minimal, scalable, and robust patrol strategy where UAVs within a team move in a random direction along their assigned closed path and "bounce" off each other when they meet. Our simulation results show that such a minimal strategy can exhibit an emergent behaviour that provides periodic and complete coverage in a 3D urban environment.