 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCalQNet -- Detection of Calibration Quality for Life-Long Stereo Camera Setups
Apr 10, 2021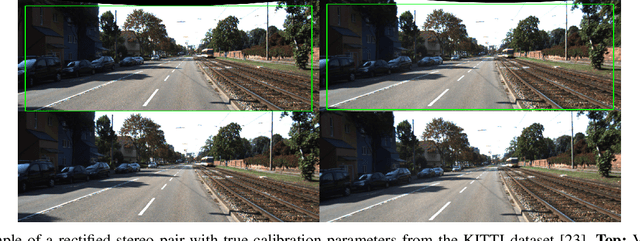
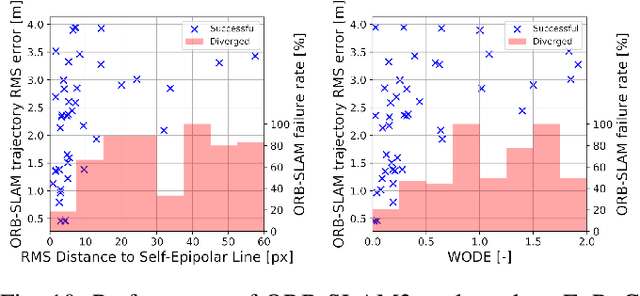
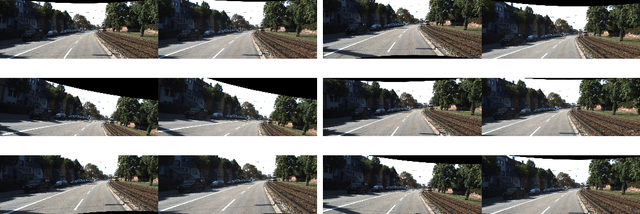
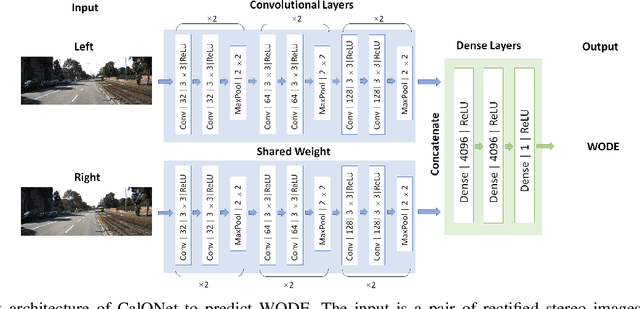
Many mobile robotic platforms rely on an accurate knowledge of the extrinsic calibration parameters, especially systems performing visual stereo matching. Although a number of accurate stereo camera calibration methods have been developed, which provide good initial "factory" calibrations, the determined parameters can lose their validity over time as the sensors are exposed to environmental conditions and external effects. Thus, on autonomous platforms on-board diagnostic methods for an early detection of the need to repeat calibration procedures have the potential to prevent critical failures of crucial systems, such as state estimation or obstacle detection. In this work, we present a novel data-driven method to estimate the calibration quality and detect discrepancies between the original calibration and the current system state for stereo camera systems. The framework consists of a novel dataset generation pipeline to train CalQNet, a deep convolutional neural network. CalQNet can estimate the calibration quality using a new metric that approximates the degree of miscalibration in stereo setups. We show the framework's ability to predict from a single stereo frame if a state-of-the-art stereo-visual odometry system will diverge due to a degraded calibration in two real-world experiments.