 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Bundle Adjustment for Multiview PointCloud Registration
Aug 06, 2021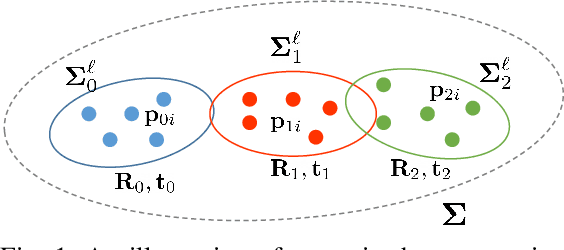
Multiview registration is used to estimate Rigid Body Transformations (RBTs) from multiple frames and reconstruct a scene with corresponding scans. Despite the success of pairwise registration and pose synchronization, the concept of Bundle Adjustment (BA) has been proven to better maintain global consistency. So in this work, we make the multiview point-cloud registration more tractable from a different perspective in resolving range-based BA. Based on this analysis, we propose an objective function that takes both measurement noises and computational cost into account. For the feature parameter update, instead of calculating the global distribution parameters from the raw measurements, we aggregate the local distributions upon the pose update at each iteration. The computational cost of feature update is then only dependent on the number of scans. Finally, we develop a multiview registration system using voxel-based quantization that can be applied in real-world scenarios. The experimental results demonstrate our superiority over the baselines in terms of both accuracy and speed. Moreover, the results also show that our average positioning errors achieve the centimeter level.