 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSLAMesh: Real-time LiDAR Simultaneous Localization and Meshing
Mar 09, 2023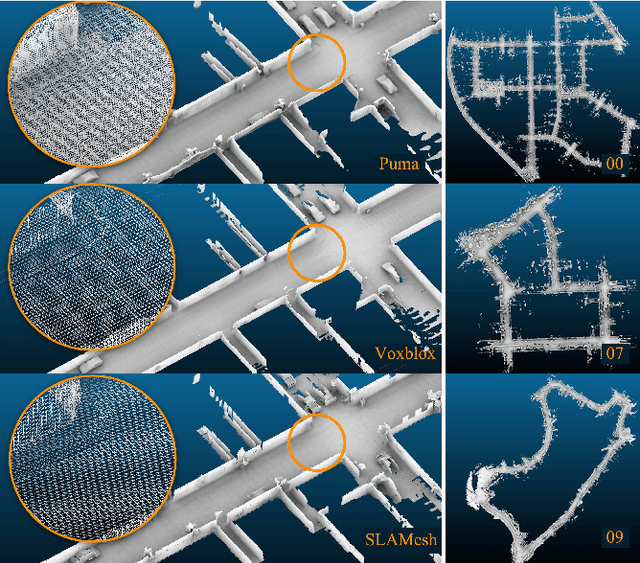
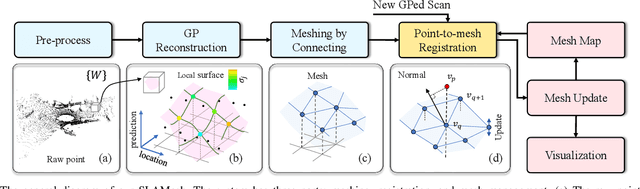
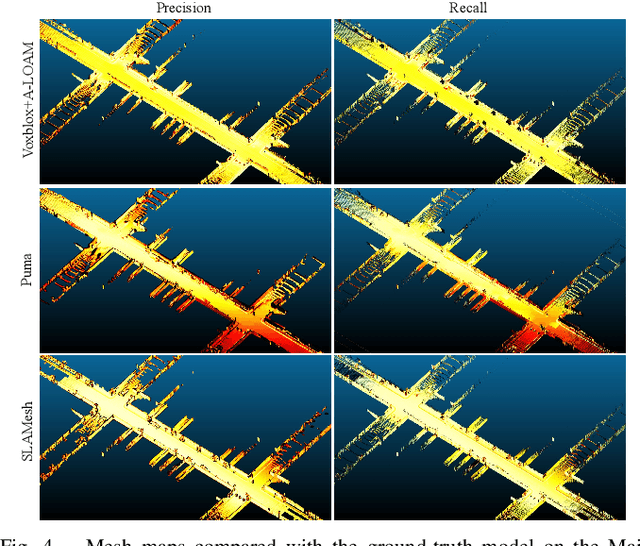
Most current LiDAR simultaneous localization and mapping (SLAM) systems build maps in point clouds, which are sparse when zoomed in, even though they seem dense to human eyes. Dense maps are essential for robotic applications, such as map-based navigation. Due to the low memory cost, mesh has become an attractive dense model for mapping in recent years. However, existing methods usually produce mesh maps by using an offline post-processing step to generate mesh maps. This two-step pipeline does not allow these methods to use the built mesh maps online and to enable localization and meshing to benefit each other. To solve this problem, we propose the first CPU-only real-time LiDAR SLAM system that can simultaneously build a mesh map and perform localization against the mesh map. A novel and direct meshing strategy with Gaussian process reconstruction realizes the fast building, registration, and updating of mesh maps. We perform experiments on several public datasets. The results show that our SLAM system can run at around $40$Hz. The localization and meshing accuracy also outperforms the state-of-the-art methods, including the TSDF map and Poisson reconstruction. Our code and video demos are available at: https://github.com/lab-sun/SLAMesh.
GP-SLAM+: real-time 3D lidar SLAM based on improved regionalized Gaussian process map reconstruction
Aug 03, 2020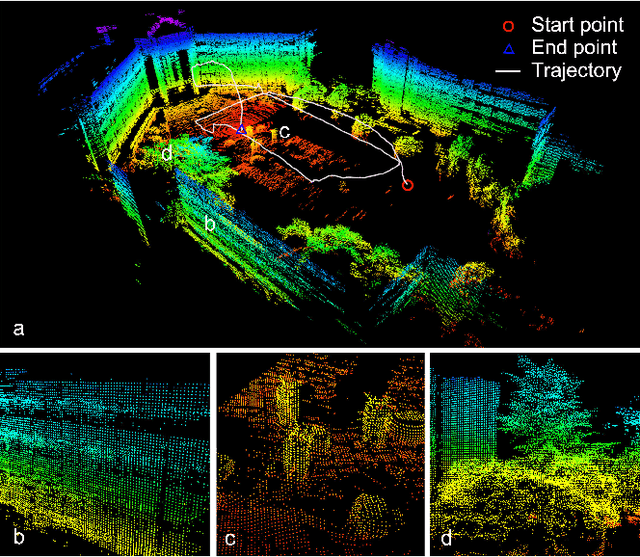
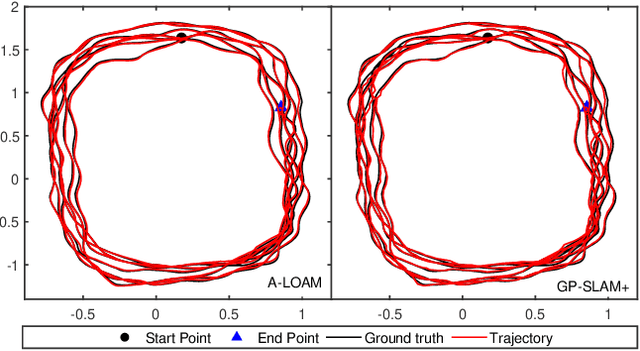
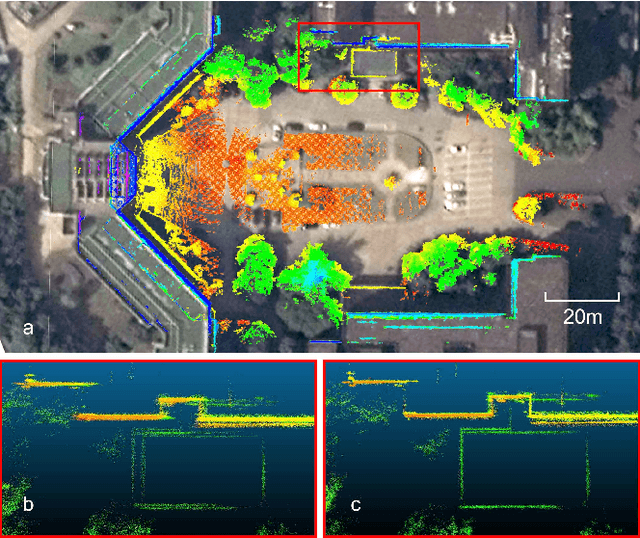
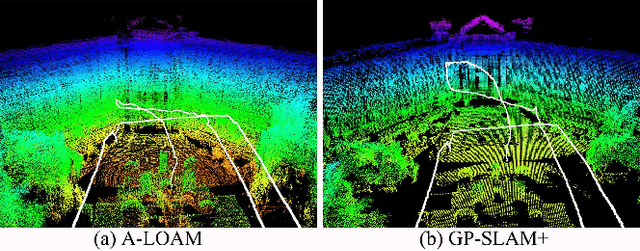
This paper presents a 3D lidar SLAM system based on improved regionalized Gaussian process (GP) map reconstruction to provide both low-drift state estimation and mapping in real-time for robotics applications. We utilize spatial GP regression to model the environment. This tool enables us to recover surfaces including those in sparsely scanned areas and obtain uniform samples with uncertainty. Those properties facilitate robust data association and map updating in our scan-to-map registration scheme, especially when working with sparse range data. Compared with previous GP-SLAM, this work overcomes the prohibitive computational complexity of GP and redesigns the registration strategy to meet the accuracy requirements in 3D scenarios. For large-scale tasks, a two-thread framework is employed to suppress the drift further. Aerial and ground-based experiments demonstrate that our method allows robust odometry and precise mapping in real-time. It also outperforms the state-of-the-art lidar SLAM systems in our tests with light-weight sensors.